3.2 Setting User Constants According to Host Controller
97
3.2.8 Using Torque Feed-forward Function
For speed control only.
1) Outline
The torque feed-forward function reduces positioning time. It differentiates a speed refer-
ence at the host controller (prepared by the customer) to generate a torque feed-forward
reference, then sends this torque feed-forward reference and the speed reference to the
Servopack.
Too high a torque feed-forward value will result in overshoot or undershoot. To prevent
this, set the optimum value while observing system response.
Connect a speed reference signal line and torque feed-forward reference signal line from
the host controller to V-REF (1CN-5, 1CN-6) and T-REF (1CN-9, 1CN-10), respectively.
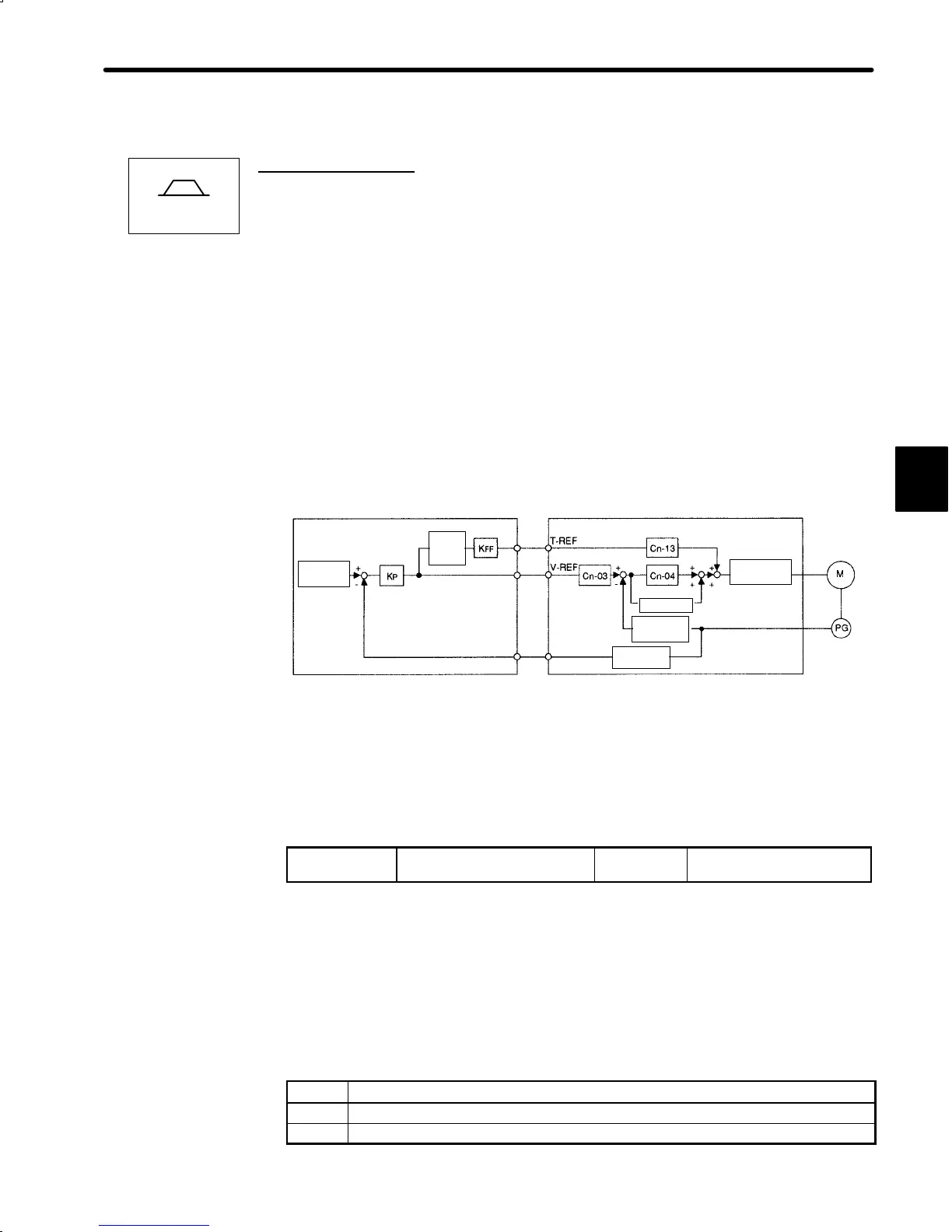
Host controller
Servopack
Diffe−
renti−
ation
Position
reference
Current
loop
Servomotor
Speed
calculation
Frequency
dividing
Encoder
K
P
: Position loop gain
K
FF
: Feed-forward gain
Schematic Block Diagram for Torque Feed-forward Control
Integration
2) How to Use Torque Feed-forward Function
To use the torque feed-forward function, set the following memory switch to 1.
Cn-01 Bit F
Selection of Torque
Feed-forward Function
Factory
Setting: 0
For Speed Control Only
Enables the torque feed-forward function.
To use the torque feed-forward function, input a speed reference to the V-REF terminal
and a torque feed-forward reference to the T-REF terminal.
The host controller must generate a torque feed-forward reference from a speed refer-
ence.
Setting Meaning
0 Does not use the torque feed-forward function.
1 Uses the torque feed-forward function.
3
Speed