MEASURES TO SATISFY THE REQUIREMENTS OF EMC DIRECTIVE
7.2.2 Applicable Noise Filter
418
7.2 Measures to Satisfy the Requirements of EMC Directive
This section describes the required measures to adapt DR2 Servopack to EMC directive
(EN50081−2, EN50082−2).
7.2.1 Applicable Servomotor 418...........................................
7.2.2 Applicable Noise Filter 418............................................
7.2.3 Motor Cables 419...................................................
7.2.4 Encoder Cables 419.................................................
7.2.5 Control I/O 420......................................................
7.2.6 Digital Operator and Monitoring by Personal Computer 420................
7.2.7 The Core on the Cable 421...........................................
7.2.8 Wiring 421..........................................................
7.2.1 Applicable Servomotor
1) Use Yaskawa Servomotor conforming to EN standard.
For details, refer to 5.4.2 Servomotor Dimensional Drawings (TÜV approved).
Servomotor Type Example: SGM−01V312 (200VAC, 100W)
SGM−01W312 (100VAC, 100W)
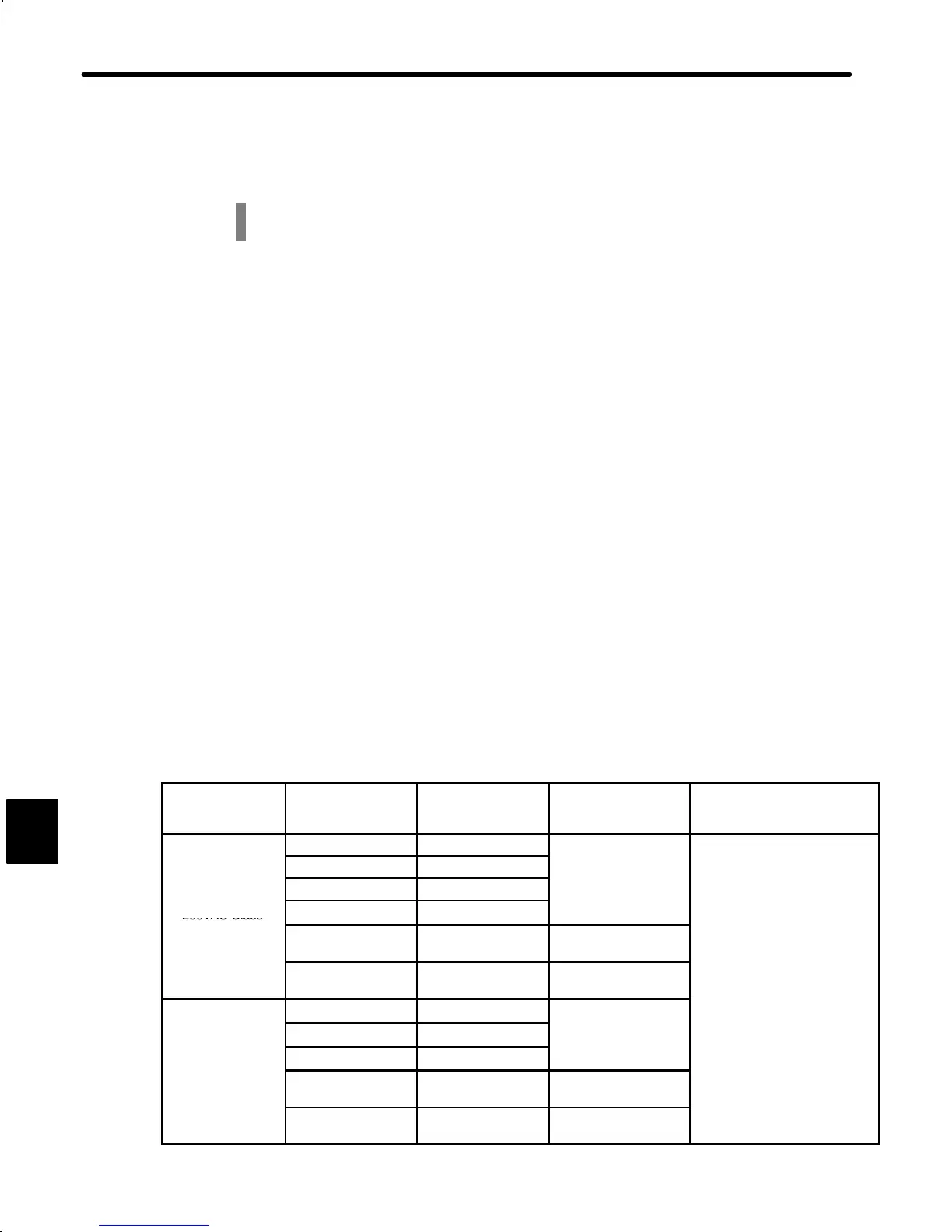
7.2.2 Applicable Noise Filter
1) Use the following noise filter.
Make sure to ground the noise filter securely.
Applied Voltage
Servopack Type
DR2−
Servopack Rated
Input Current
A (rms)
Noise Filter Type
and Specifications
(Input Line)
Noise Filter Type and
Specifications
(Power Supply for Brake)
A3Aj 1.3
A5Aj 1.5
SUP−P5H−EPR
01Aj 2.5
250V, 5A
200VAC Class
02Aj
4.0
04Aj
6.0
SUP−P8H−EPR
250V, 8A
08Aj
11.0
SUP−P10H−EPR
250V, 10A
SUP−P5H−EPR
A3Bj
2.0
,
A5Bj
2.6
SUP−P5H−EPR
250V, 5A
01Bj
4.5
,
100VAC Class
02Bj
8.0
SUP−P8H−EPR
250V, 8A
03Bj
14.0
SUP−P10H−EPR
250V, 10A
7

 Loading...
Loading...


