9 Fully-closed Loop Control
9.2.1 Setting Order
9-10
9.2 Settings for Fully-closed Loop Control
This section describes the setting for fully-closed loop control.
9.2.1 Setting Order
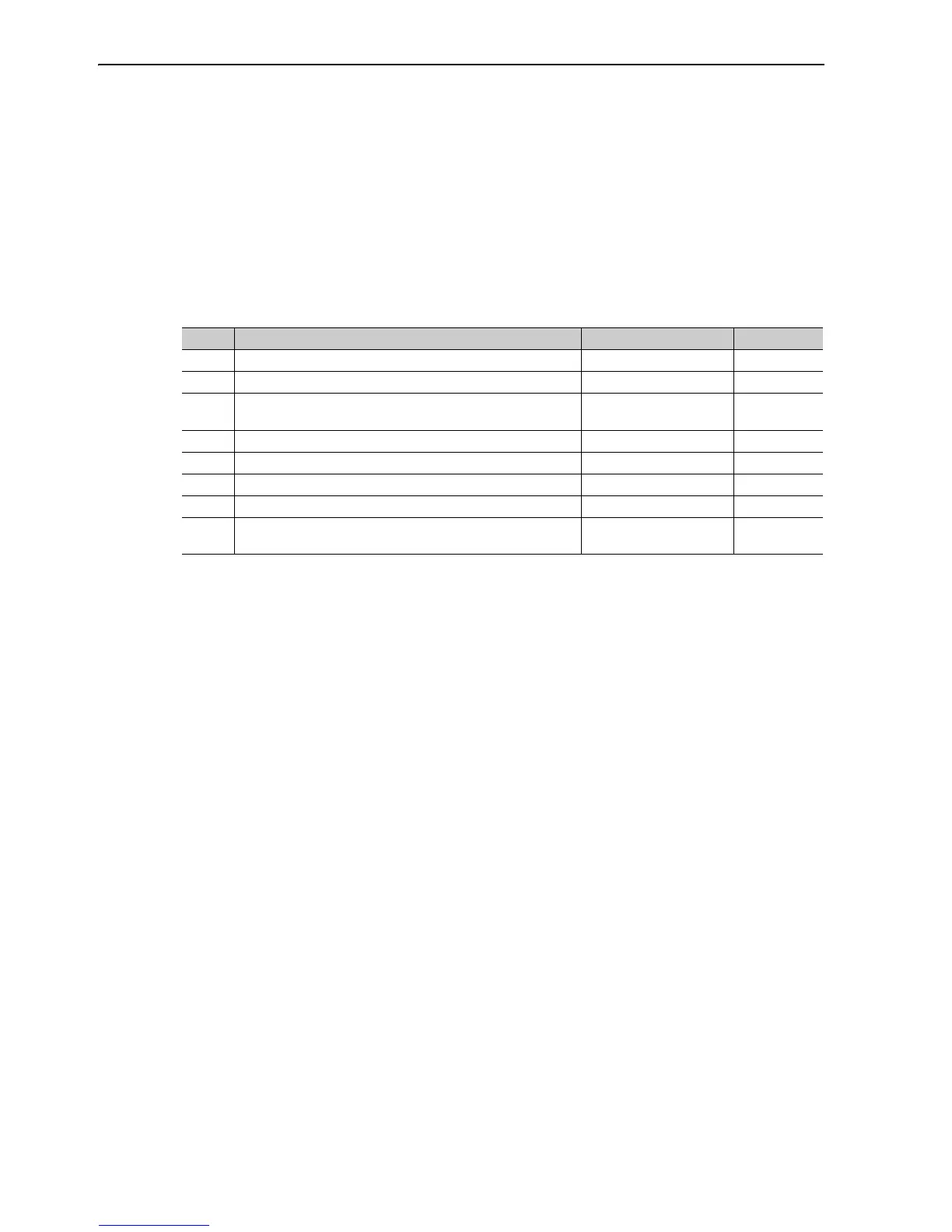
The basic setting order is shown below.
If the SERVOPACK is in speed control or torque control, perform steps 1 through 4.
If the SERVOPACK is in position control, perform steps 1 through 8.
Step Setting Contents Set Parameters Reference
1 Set the motor rotating direction. Pn000.0/Pn002.3 9.2.2
2 Set the number of pitches for the external encoder. Pn20A 9.2.3
3
Set the number of encoder output pulses (PAO, PBO and PCO)
from the SERVOPACK.
Pn281 9.2.4
4 Set the absolute external encoder data reception sequence. − 9.2.5
5 Set the electronic gear. Pn20E/Pn210 9.2.6
6 Set the alarm detection Pn51B/Pn52A 9.2.7
7 Set the analog monitor signal. Pn006/Pn007 9.2.8
8
Select a speed feedback method during fully-closed loop
control.
Pn22A 9.2.9

 Loading...
Loading...


