6 Adjustments
6.9.5 Using the Mode Switch (P/PI Switching)
6-68
(2) Related Parameters
Proportional control operation is enabled when the control mode is set to speed or position control.
∗1. When switching to speed control, the /P-CON signal does not have to be allocated.
∗2. When switching to position control, the /P-CON signal does not have to be allocated.
6.9.5 Using the Mode Switch (P/PI Switching)
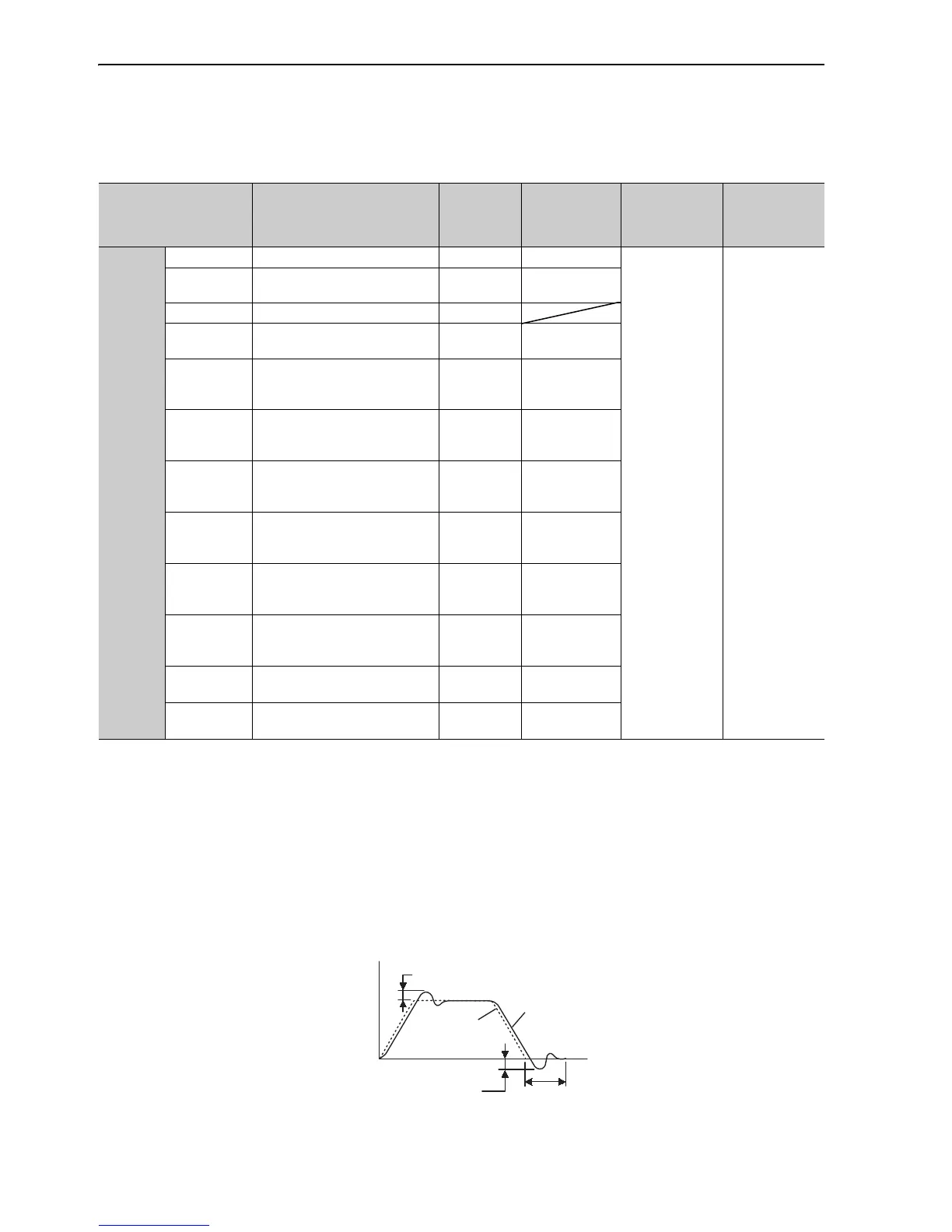
Use the mode switch (P/PI switching) function in the following cases:
• To suppress overshooting during acceleration or deceleration (for speed control)
• To suppress undershooting during positioning and reduce the settling time (for position control)
P Control: Proportional control
PI Control: Proportional/integral control
The mode switch changes the speed-control mode to PI control or P control in accordance with the setting of
Pn10B.0.
Parameter Contents
Proportional
Control
Enabled/
Disabled
/P-CON Signal
Allocation
When Enabled Classification
Pn000
n.0 Speed control (analog reference) Enabled Not required
After restart Setup
n.1
Position control (pulse train
reference)
Enabled Not required
n.2 Torque control (analog reference) Disabled
n.3
Internal set speed control (contact
reference)
Enabled Required
n.4
Internal set speed control (contact
reference)
⇔ Speed control
(analog reference)
Enabled
Required
*1
n.5
Internal set speed control (contact
reference)⇔ Position control
(pulse train reference)
Enabled
Required
*2
n.6
Internal set speed control (contact
reference)⇔ Torque control
(analog reference)
Enabled Required
n.7
Position control (pulse train refer-
ence)
⇔ Speed control
(analog reference)
Enabled Required
n.8
Position control (pulse train refer-
ence)
⇔ Torque control
(analog reference)
Enabled Required
n.9
Torque control (analog refer-
ence)
⇔ Speed control
(analog reference)
Enabled Required
n.A
Speed control (analog refer-
ence)
⇔ Zero clamp
Enabled Required
n.B
Position control (pulse train refer-
ence)
⇔ Position control (inhibit)
Enabled Required

 Loading...
Loading...


