9 Fully-closed Loop Control
9.2.2 Motor Rotation Direction
9-12
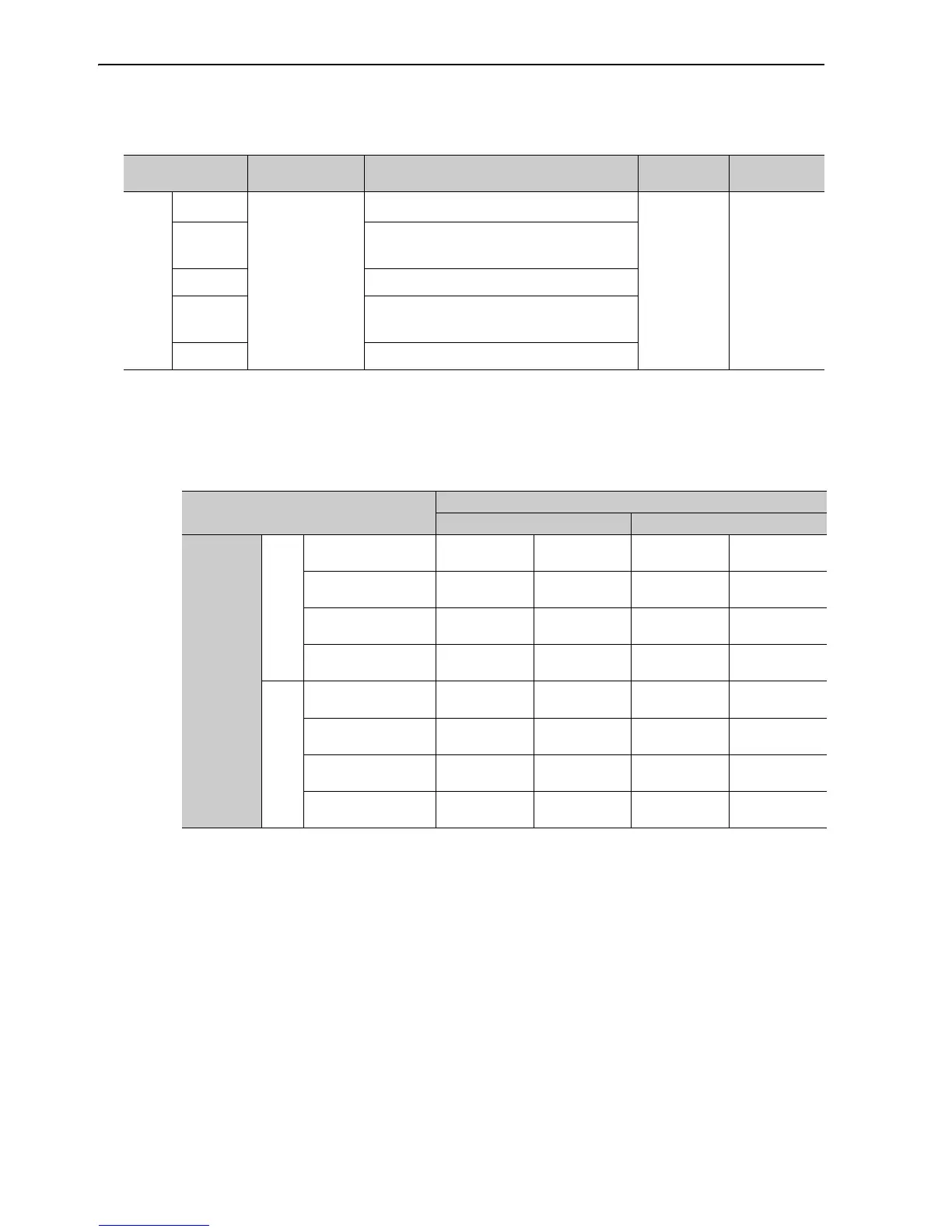
(2) Parameter Pn002.3
Note 1. The mode will be switched to semi-closed position control if Pn002.3 is set to 0.
2. The direction for which the external encoder is counted up counter clockwise is defined as forward rotation.
3. The direction for which the external encoder is counted up clockwise is defined as forward rotation.
(3) Relation between Motor Rotating Direction and External Encoder Pulse Direction
Refer to the table below.
• Set Pn002.3 to 1 if the output of the external encoder is cos lead and the motor is turning counterclockwise;
set Pn002.3 to 3 if it is sin
lead. When Pn000.0 is set to 0 and Pn002.3 to 1, manually turn the motor coun-
terclockwise. If the Fully-closed Feedback Pulse Counter (Un00E) counts up, set Pn002.3 to 1. If the
Un00E counts down, set Pn002.3 to 3.
• If Pn002.3 is set to 1, encoder output pulse is phase B lead if the motor runs forward.
If Pn002.3 is set to 3, it is phase A lead if the motor turns forward.
Parameter Name Meaning
When
Enabled
Classification
Pn002
n.0
External Encoder
Usage
Do not use. [Factory setting]
∗1
After restart Setup
n.1
Use external encoder in forward rotation direc-
tion.
∗2
n.2
Reserved (Do not set).
n.3
Use external encoder in reversed rotation direc-
tion.
∗3
n.4
Reserved (Do not set).
Parameter
Pn002.3 (External Encoder Usage)
1 3
Pn000.0
(Motor
rotating
direction)
0
Reference
direction
Forward run
reference
Reverse run
reference
Forward run
reference
Reverse run
reference
Motor rotating direc-
tion
CCW CW CCW CW
External encoder out-
put
cos lead sin lead sin lead cos lead
Encoder output pulse
Phase B
lead
Phase A
lead
Phase A
lead
Phase B
lead
1
Reference
direction
Forward run
reference
Reverse run
reference
Forward run
reference
Reverse run
reference
Motor rotating direc-
tion
CW CCW CW CCW
External encoder
output
sin lead cos lead cos lead sin lead
Encoder output pulse
Phase B
lead
Phase A
lead
Phase A
lead
Phase B
lead

 Loading...
Loading...


