336 Configuration
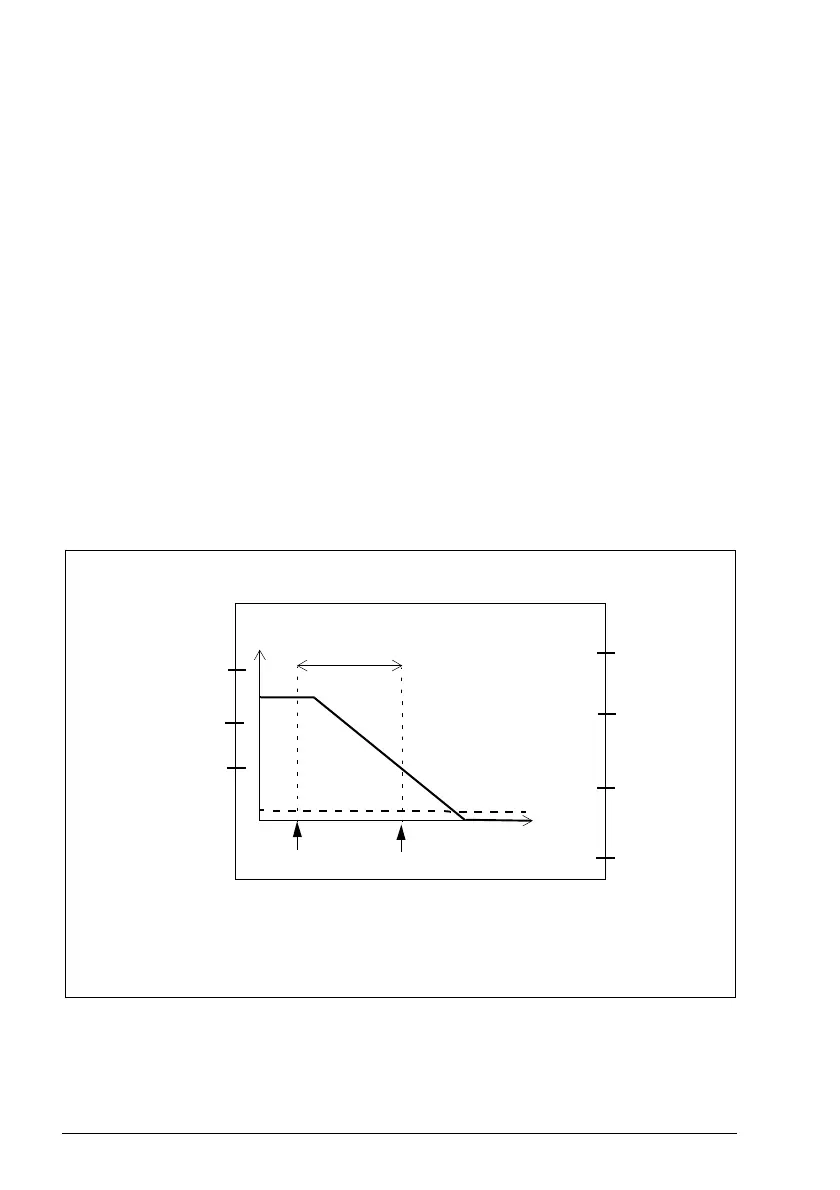
Example 2 (with an encoder): The figure below shows an example of the SBC
before the STO set-up when an encoder is used. Configure the safety encoder
interface first (see section Configuring the safety encoder interface on page 313).
• STO delayed brake with negative delay -500 ms
(SBC.11 STO SBC usage = Delayed brake, SBC.12 STO SBC delay = -500 ms)
• redundant emergency stop button connected to input
(STO.11 STO input A = DI X113:1 & X114:1)
• automatic acknowledgement (STO.02 STO acknowledgement = Automatic)
• zero speed limit where STO function is completed and it can be acknowledged is
40 rpm (parameter FSOGEN.52 Zero speed with encoder = 40 rpm)
• brake connected to redundant output, diagnostic pulses activated
(SBC.21 SBC output = DO X113:7 & X114:7, SAFEIO.53 and SAFEIO.56 = On),
SAFEIO.21 Safety relay 1 output = DO X113:7 & X114:7)
• STO is activated if brake feedback fails (SBC.22 SBC feedback action = STO)
• brake feedback input connected to input
(SAFEIO.22 Safety relay 1 feedback = DI X113:2)
• feedback input type NC (inverted state compared with the brake relay)
(SAFEIO.23 Safety relay 1 feedback type = Mechanically linked NC contacts).
SBC.12 = -500 ms
Speed
Time
STO activated
SBC activated
Inputs
Outputs
STO.02 = Automatic
STO.21
= None
STO.22
= None
SBC.21
= DO X113:7 &
X114:7
SBC.11 = Delayed brake
SBC.22 = STO
SAFEIO.23 = Mechanically linked NC contacts
STO.11
= DI X113:1 & X114:1
STO.12
= None
SAFEIO.53, SAFEIO.56 = On
FSOGEN.52
= 40 rpm
SAFEIO.22
= DI X113:2
SAFEIO.21
= DO X113:7
& X114:7