5.5.3.4. Set AB point operation height
The operating altitude at point AB is the altitude at which the drone is located at point B.
When operating at point AB, you can manually operate the remote control to adjust the altitude.
The operation at point AB will not be suspended, and the drone will operate at the new height
after adjustment.
5.5.3.5. Self-checks before operation
After confirming the operating parameters, the pop-up window self-checks the status of the
drone. Please carefully check the take-off altitude and return altitude of the drone, and slide to
unlock the AB operation.
A.
The altitude of the take-off transfer point is the same as the take-off altitude, and the
altitude of the return transfer point is the same as the return altitude.
B.
Please pay attention to the action of the drone after spraying the tank, the remote control is
out of control, and severe low battery alarm. If you need to modify, please return to the
execution working interface to modify in more settings.
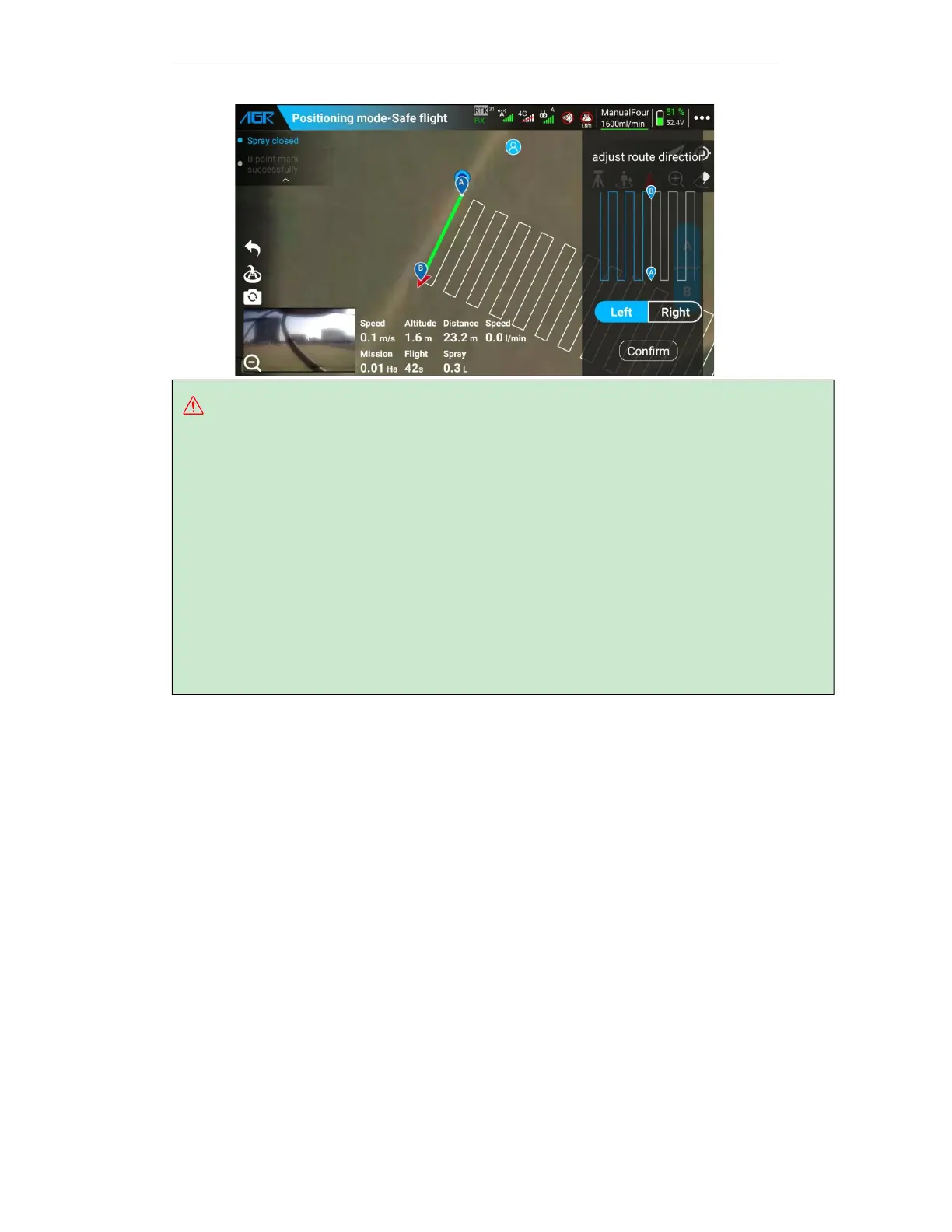
tips:
a.
The route direction cannot be changed after starting the operation. Please observe the actual field
conditions and select the correct route direction before starting the operation to avoid danger.
b.
The left-right direction of the route is the left-right line, not the user's direction. For example, if the
user stands at point B and faces point A, the left-right direction of the route is opposite to the left-right
direction of the user!
c.
The operating altitude at point AB is the operating altitude of the drone at point B.
d.
You can manually operate the remote control to adjust the height during the AB point operation.
During the adjustment, the drone will not pause the AB point operation, and the drone will operate at
the adjusted height.
e.
If it is found that the drone will hit an obstacle or a person during operation, you can manually push
the throttle to raise the drone and bypass the obstacle from above.