8630 - 163
GENERAL RULES (APPENDIX)
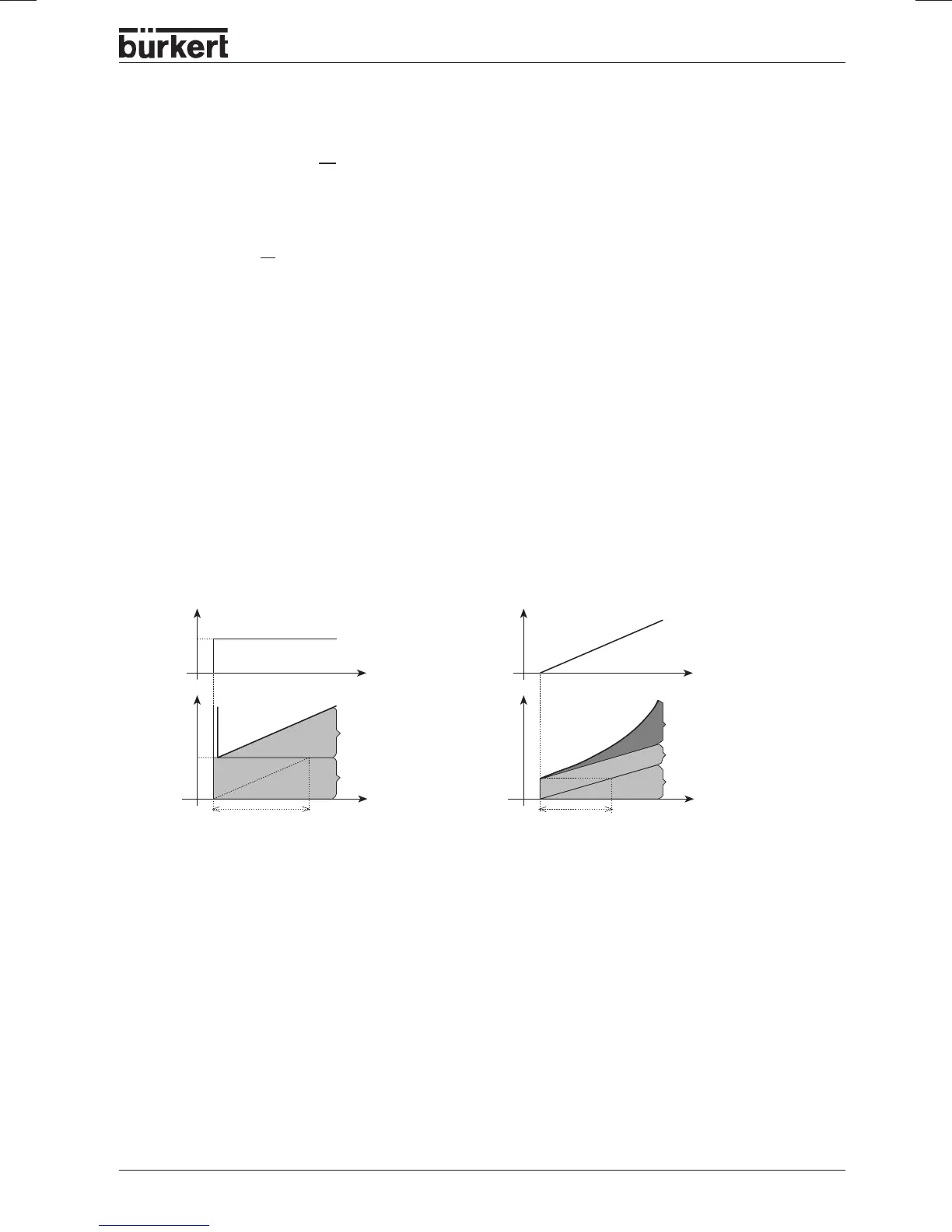
Step response and rise response of the PID controller
1
Ti
Superimposing the P, I and D components
Function:
Y = Kp Xd +
∫∫
∫∫
∫
Xd dt + d Xd/dt
Substituting Kp · Ti = Tn and Kd/Kp = Tv we obtain for the function on the PID controller:
Y = Kp (Xd +
∫∫
∫∫
∫
Xd dt + Tv dXd/dt)
Kp is the proportional action factor/amplification factor
Tn is the reset time
(the time required to obtain the same change in correcting variable as was caused by the P
component) and
Tv is the rate time
(the time by which a certain change in correcting variable is obtained earlier with the D
component than t would have been with a pure P controller).
1
Tn
Nachstellzeit Tn
t
P-Anteil
I-Anteil
D-Anteil
Y
t
Xd
X
Kp•Xd
Vorhaltzeit Tv
t
P-Anteil
I-Anteil
D-Anteil
Y
t
X
Step response of the PID controller Rise response of the PID controller
I-Component
P-Component
D-Component
Reset time Tn
D-Component
I-Component
P-Component
Derivative action time Tv