164 - 8630
GENERAL RULES (APPENDIX)
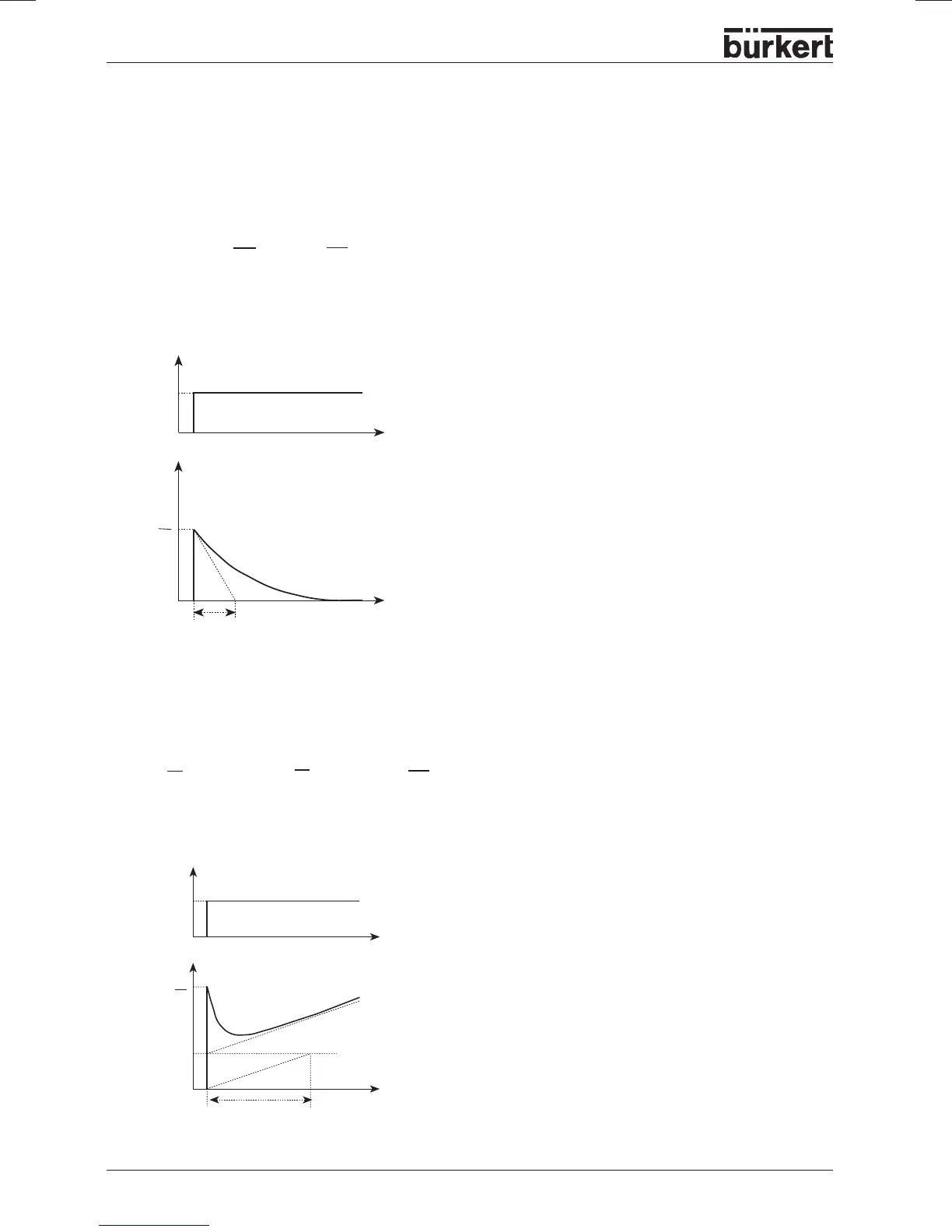
Function of a real PID controller
D component with delay
In the process controller of the positioner, the D component is realized with a delay T.
Function
T + Y = Kd
Tn
Kp Xd
t
Y
Kp
Tv
T
t
X
Xd
Function of the real PID controller
T + Y = Kp (Xd +
∫∫
∫∫
∫
Xd dt + Tv )
Step response of the real PID controller
Xd
T
T
t
Y
t
X
Xd
dY
dt
dXd
dt
Superimposing the P, I and DT components
dY
dt
1
Tn
dXd
dt