3.3 Hardware Installation
Install the robot, controller and teach pendant, the key components of the system in the work area, and
supply power to them before operating the robot. The installation of each component is as follows:
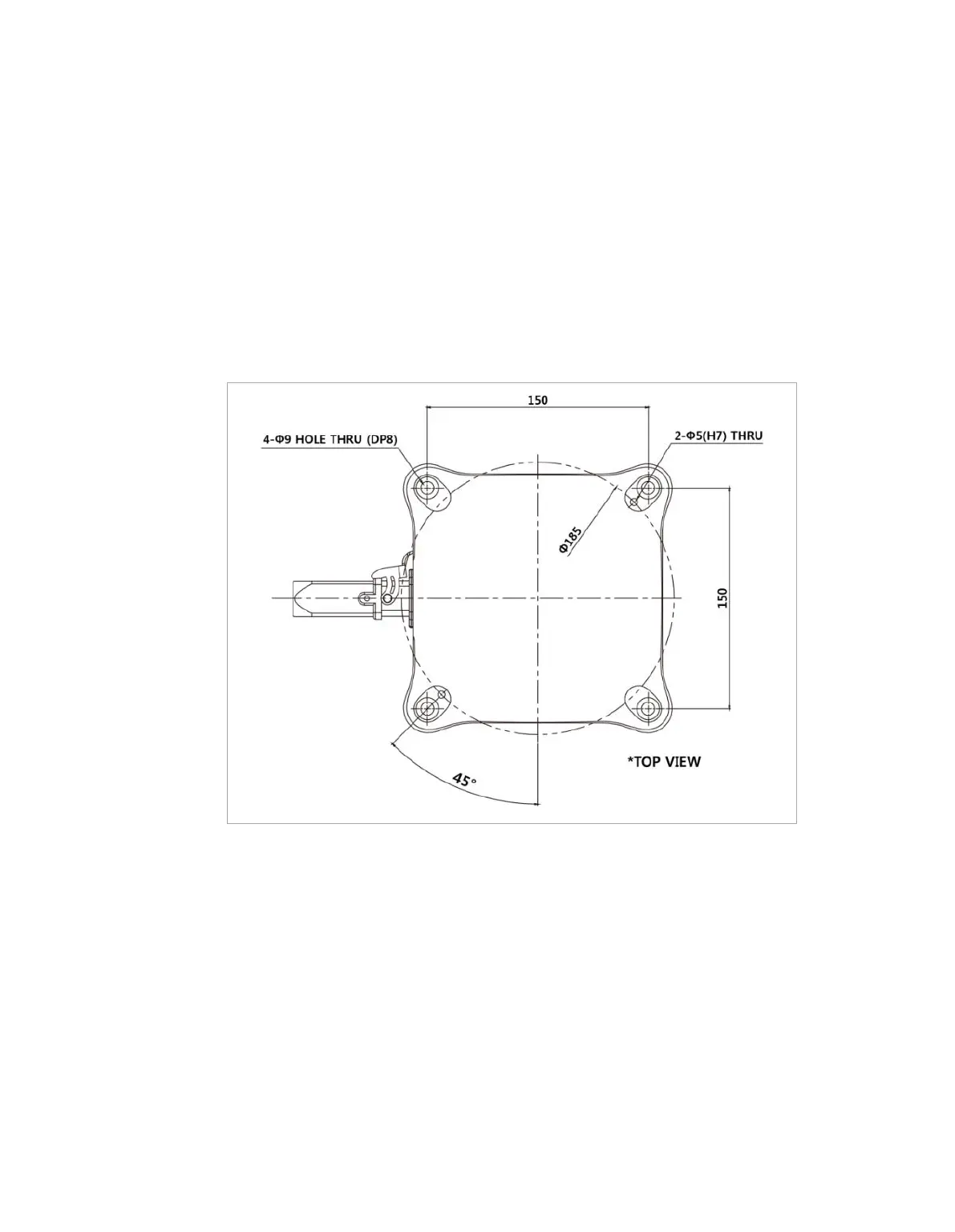
3.3.1 Securing the Robot
Use M8 bolts in the four 9.0 mm holes on the manipulator base to secure the robot.
• It is recommended to use tightening torque of 20 Nm to tighten the bolts.
And use a washer(plain or spring) to prevent loosening of the tension caused by vibration.
• Use a Φ5 place marker pin to accurately install the manipulator in a fixed location.
The manipulator base drawing and four M8 bolts are used (M series). Unit [mm]
 Loading...
Loading...
