57
Function
End Point
End Point
8VHGWRDGMXVW WKHOHIWDQGULJKWHQGSRLQWVRIWKHVWHHULQJZKHHODGMXVWWKHWKURWWOHKLJK
side/brake side manipulated variable, change the channel 3, channel 4, auxiliary channel
VHUYRXSVLGHGRZQVLGHPDQLSXODWHGYDULDEOH
&RUUHFWWKHPD[LPXPVWHHULQJDQJOHIRUOHIWDQGULJKWVWHHULQJDQJOHVZKHQWKHUHLVD
GL൵HUHQFHLQWKHWXUQLQJUDGLXVGXHWRWKHFKDUDFWHULVWLFVRIWKHYHKLFOH
The End point function determines the maximum steering angle of each channel.
7KHIXQFWLRQVVKRZQEHORZPD\KDYHEHHQDGMXVWHGRUWKHRSHUDWLQJUDQJHVHWE\(QG
SRLQW IXQFWLRQPD\EH H[FHHGHG&KHFNWKH OLQNDJHHDFKWLPH WKHIROORZLQJIXQFWLRQV
are adjusted.
6XEWULPDOOFKDQQHOV
---------------------------------------------- SDJH
3URJUDPPL[LQJVODYHVLGHDOOFKDQQHOV ---------------------page 126
,GOHXSWKURWWOH---------------------------------------------------- page 74
(QJLQH&XWWKURWWOH ---------------------------------------------SDJH
7KURWWOHDFFHOHUDWLRQWKURWWOH ----------------------------------- page 62
Brake rate trim
Maximum steering angle
%UDNHUDWHWULPDOORZVDGMXVWPHQWRIWKHEUDNHVLGHRSHUDWLRQDPRXQWGXULQJRSHUDWLRQ
7KHUHIRUH ZKHQ WKH RSHUDWLQJ DQJOHLV DGMXVWHGZLWK WKH WKURWWOH(QGSRLQWWKHEUDNH
rate trim must also be taken into account.
Warning
Operate each servo over its full stroke and be sure
the linkage does not bind or is not loose.
The continuous application of unreasonable force to a servo may
cause damage and excessive battery drain.
$GMXVWWKHWKURWWOHVHUYRVRWKDWXQUHDVRQDEOHIRUFHLVQRWDSSOLHGZKHQWKHHQJLQHFDUEXUHWRULVIXOO\
open, fully closed, and the brakes are implemented fully.
,IWKHEUDNHVRYHUKHDWZKLOHUXQQLQJWKHLUDELOLW\WRIXQFWLRQFRUUHFWO\GHFUHDVHV%HIRUHUXQQLQJDGMXVW
WKHVXLWDEOHPD[LPXPVHUYRWUDYHOVRWKDWXQUHDVRQDEOHIRUFHLVQRWDSSOLHGHYHQZKHQWKHVHUYRWUDYHO
LVLQFUHDVHGZKLOHUXQQLQJ
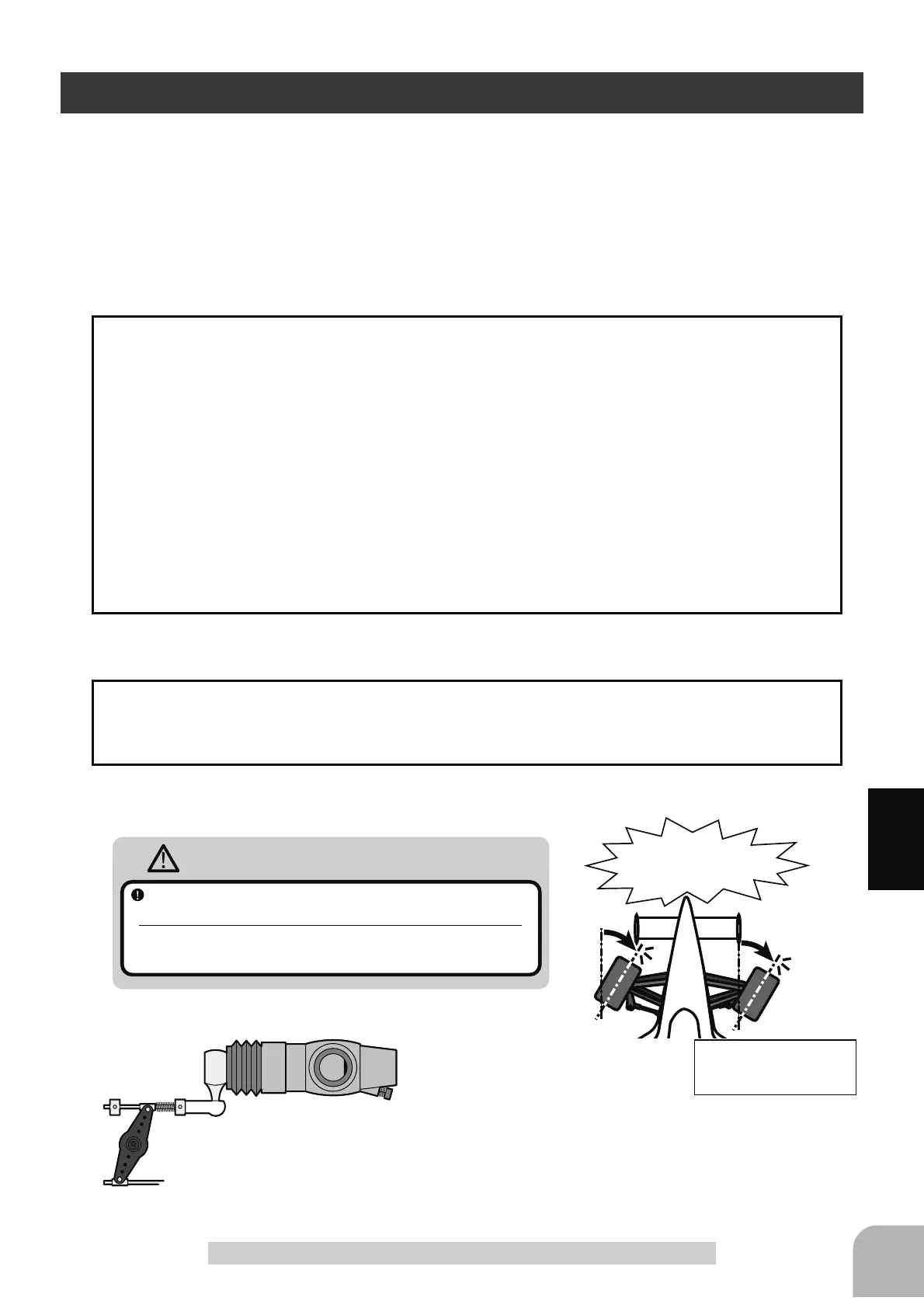
Adjust the steering servo so that unreason-
able force is not applied to the servo by the
chassis at maximum servo travel.
Decide the End point
value at the contact
point.
Caution!
A whining noise indicates that the
steering servo is improperly set.