167
Alarms
PID Function Block
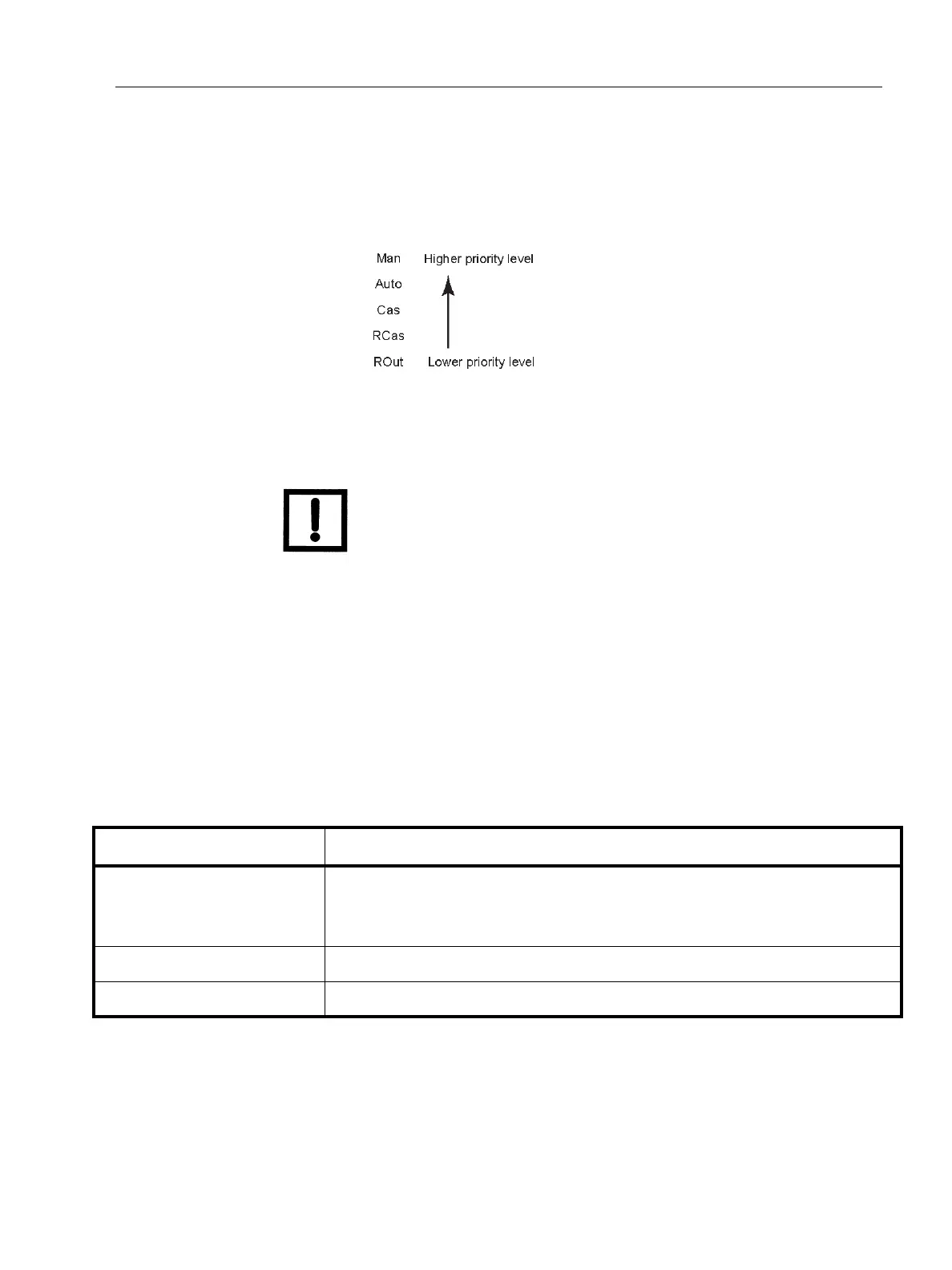
(*1) The modes to which the PID block can transfer are limited to those set in
MODE_BLK.permitted, and the priority levels of modes (Figure 75). In fact, if Normal
shed, normal return is set for SHED_OPT, detection of a computer failure causes
MODE_BLK.actual to change to Cas, Auto, or Man, whichever is set in
MODE_BLK.permitted and has the lowest priority level.
Figure 75 Priority Levels
(*2) Only when Auto is set as permitted mode.
NOTE If a control block is connected as a cascade primary block of
the PID block in question, a mode transition of the PID block
to Cas occurs in the following sequence due to initialization
of the cascade connection: RCas or ROut —> Auto —>
Cas.
Alarms
There are two kinds of alarms generated by a PID block: block and process alarms.
Block Alarm (BLOCK_ALM)
The block alarm BLOCK_ALM is generated on occurrence of the errors in Table 52
(values set in BLOCK_ERR) and notifies the content of BLOCK_ERR.
Table 52 Block Alarm (BLOCK_ALM)
Value of BLOCK_ERR Condition
Input Failure
IN.status of the PID block is either of the following:
❑ Bad-Device Failure
❑ Bad-Sensor Failure
Local Override MODE_BLK.actual of the PID block is LO.
Out of Service MODE_BLK.target of the PID block is O/S.