Page 34 Foundation Fieldbus RMA803 Remote Indicator User's Guide Revision 4
Process Alarms
A set of alarms that indicates a process value has exceeded a certain threshold. Process Alarm
detection is based on the OUT value. The alarm limits can be configured for the following standard
alarms:
• High (HI_LIM)
• High High (HI_HI_LIM)
• Deviation High Limit (DEV_HI_LIM)
• Deviation Low Limit (DEV_LO_LIM)
• Low (LO_LIM)
• Low Low (LO_LO_LIM)
When the value OUT oscillates, ALARM_HYS is used to avoid alarm triggering. The priority of
each alarm is set by the following parameters:
• HI_PRI
• HI_HI_PRI
• DV_HI_PRI
• DV_LO_PRI
• LO_PRI
• LO_LO_PRI
The following is the order of priority for alarms.
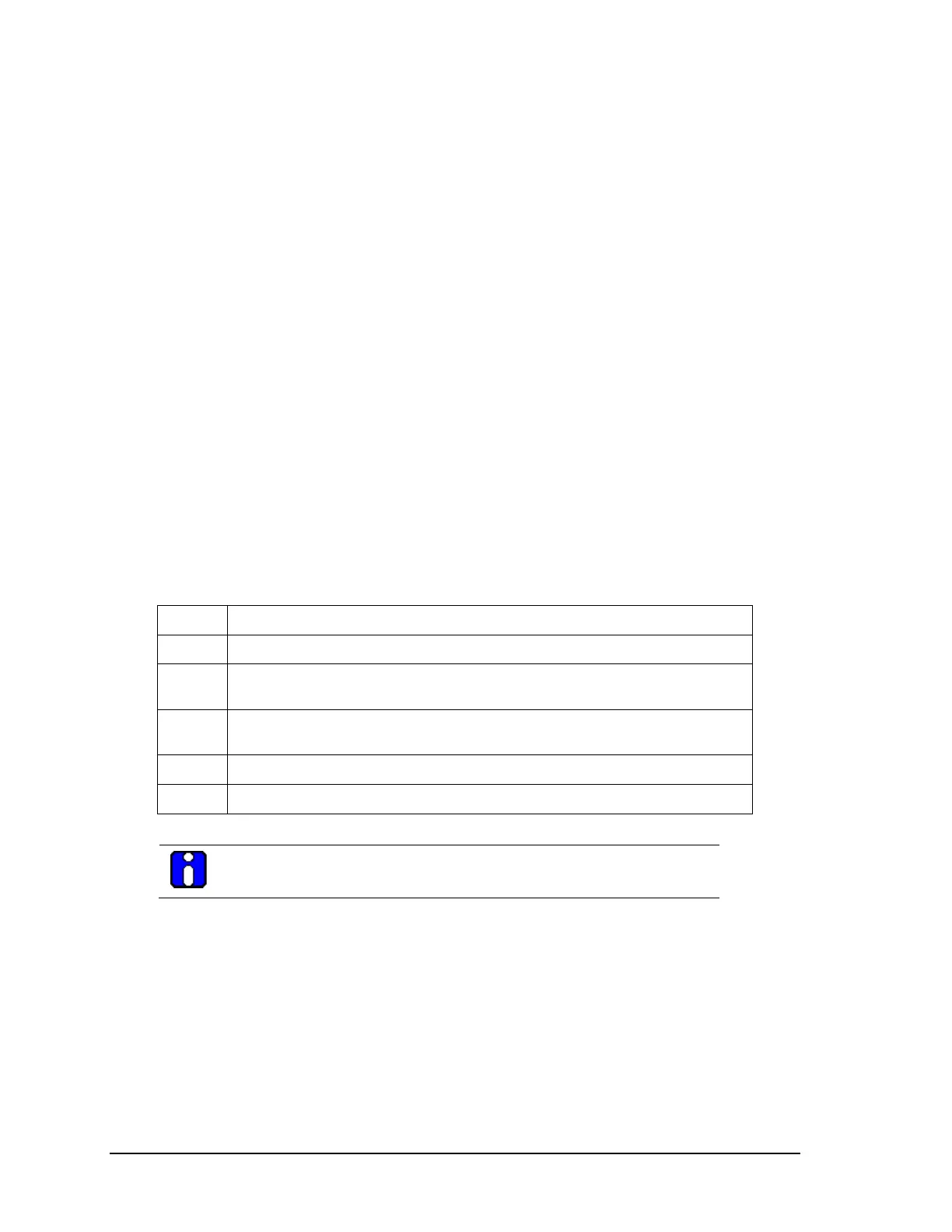
Table 13: Priority for Alarms
Priority Description
0 To disable the triggered alarm, the priority of an alarm condition is changed to 0.
1 Alarm condition with a priority 1 is reported to the system, but not reported as an
event and alarm
2 Alarm condition with priority of 2 is reported to the system and event, but not
reported as an alarm.
3-7 Alarm conditions of priority 3 to 7 are reported as advisory alarms.
8-15 Alarm conditions of priority 8 to 15 are reported as critical alarms.
ATTENTION
Process alarms are not supported by all blocks.
 Loading...
Loading...
