-
75
-
6
6 Troubleshooting and Solutions
Problem Solutions
Too loud motor noise
● Increase the setting of F0-15 (carrier frequency) by 1.0kHz gradually. Note that increase
in carrier frequency will result in an increase in the leakage current of the motor.
Insufcient motor torque
● Check whether torque upper limit is small. If yes, please: increase the setting of F2-10
(digital setting of torque upper limit in speed control mode) in the speed control mode;
increase the torque reference (A0-03) in the torque control mode.
3. Drive in V/F Control (F0-01 = 2)
It is applicable to application without an encoder for speed feedback. You need only to set rated motor voltage
and rated motor frequency correctly.
Problem Solutions
Motor oscillation during
running
● Increase the setting of F3-11 (V/F oscillation suppression gain) by 10 gradually. The
permissible maximum setting here is 100.
Overcurrent during start ● Decrease the setting of F3-01 (torque boost) by 0.5% gradually.
Very large current during
running
● Set rated motor voltage (F1-02) and rated motor frequency (F1-04) correctly.
● Decrease the setting of F3-01 (torque boost) by 0.5% gradually.
Too loud motor noise
● Increase the setting of F0-15 (carrier frequency) by 1.0kHz gradually. Note that increase in
carrier frequency will result in an increase in the leakage current of the motor.
Overvoltage detected
when heavy load is
suddenly removed or
during deceleration
● Ensure that F3-23 (overvoltage stall enable) is enabled. Increase the setting of F3-24/F3-
25 (overvoltage stall gain, default is 30) by 10 gradually. The permissible maximum setting
here is 100.
● Decrease the setting of F3-22 (overvoltage stall actuating voltage, default is 770V) by 10
V gradually. The permissible minimum setting here is 700 V.
Overcurrent detected
when heavy load is
suddenly added or
during acceleration
● Increase the setting of F3-20 (overcurrent stall gain, default is 20) by 10 gradually. The
permissible maximum setting here is 100.
● Decrease the setting of F3-18 (overcurrent stall actuating current, default is 150%) by 10%
gradually. The permissible minimum setting here is 50%.
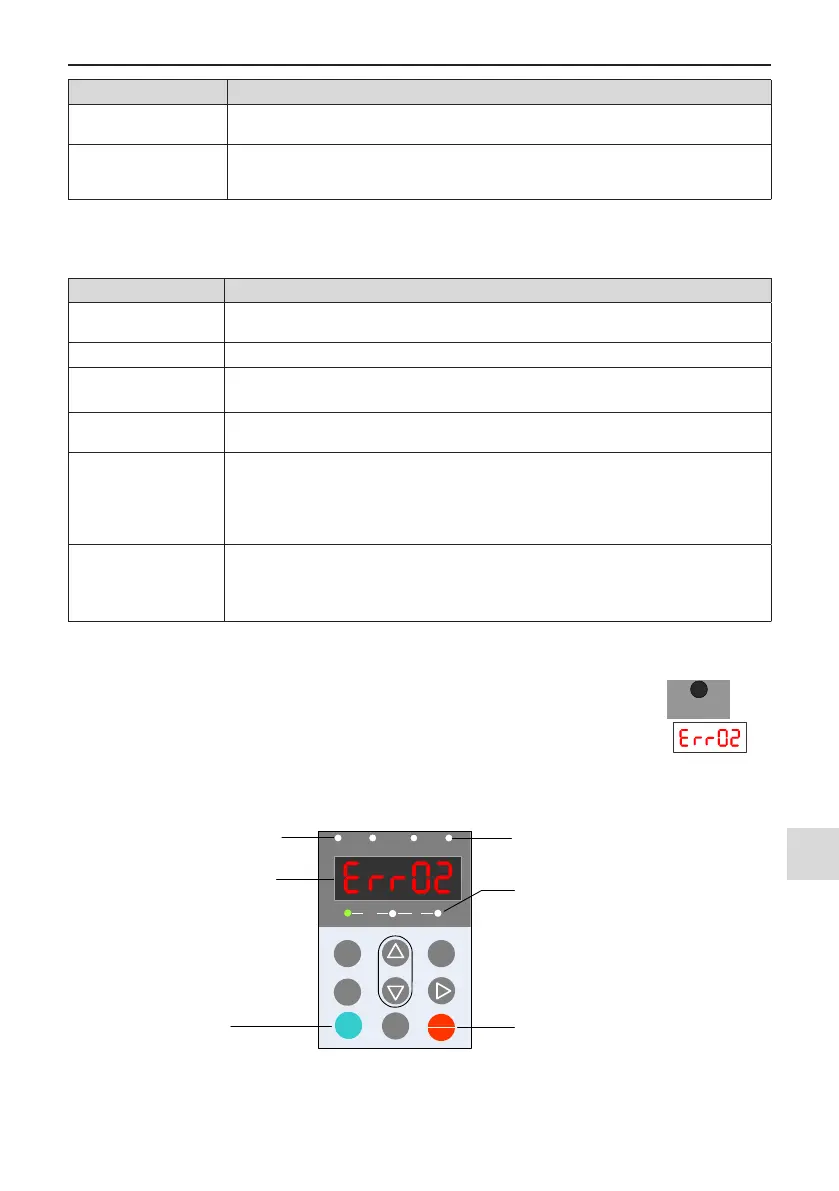
6.3 Fault Display
When a fault occurs during running, the AC drive stops output immediately, the fault indicator
ash-
es, and the contact of the fault relay acts. The operating panel displays the fault code such as , as
shown in the following gure. Solutions in the table are for reference only. Do not repair or transform the drive
by your self. If the fault persists, contact Inovance or our agent for technical support.
MF. K
RUN
STOP
RES
QUICK
PRG ENTER
RUN
LOCAL/ REMOT FED/ REV TUNE/TC
RPM
%
A VHz
RUN indicator
Fault display
RUN
Stop/Reset
Unit indicator
Tuning/Torque
control/Fault indicator
Figure 6-1 Interface

 Loading...
Loading...