104 sur 140
Version 2.5 (11/2020) UL
Traduction de la notice d’utilisation originale
Mise en service et fonctionnement
• AdressesIP des MultiControl voisines (pour les programmes ZPA et ZPA+)
IP adress upstream: Adresse de la MultiControl à partir de laquelle les articles, conteneurs, produits transportés,
produits,... sont repris
IP adress downstream: Adresse de la MultiControl à partir de laquelle les articles, conteneurs, produits transportés,
produits,... sont livrés
• Détermine si les données de la API sont au format big-endian (octet haut/bas échangé).
Pour transférer les paramètres modiés sur la MultiControl, appuyez sur le bouton «Submit».
REMARQUE
Destruction du MultiControl causée par une déconnexion prématurée de la tension d'alimentation
¾ S'assurer que l'alimentation électrique est disponible en permanence pendant le changement de type de bus
jusqu'à ce que le redémarrage soit terminé. Le processus dure env. deuxminutes.
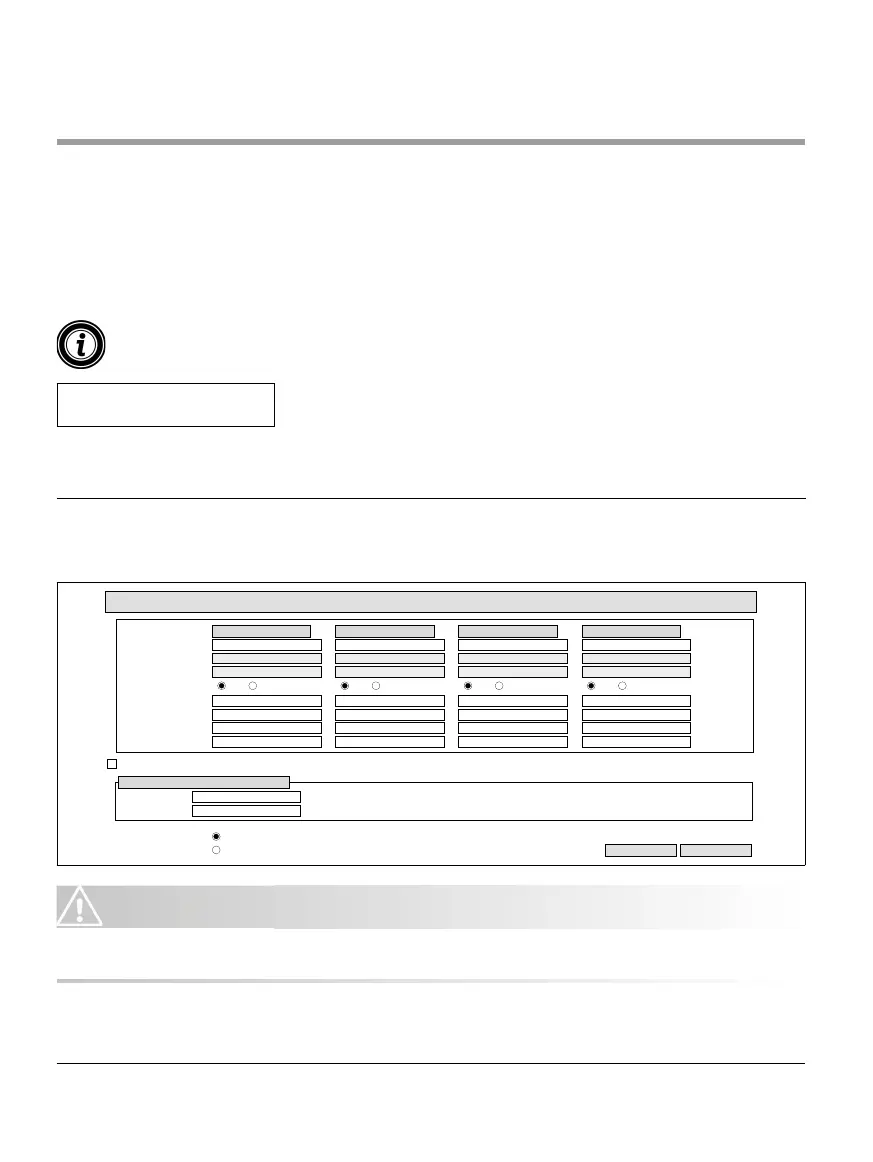
Motor Settings
Motor Settings
Motor 3
Submit Reset
Motor 4Motor 2Motor 1
Motor Type
Roller Diameter [mm]
Gearing Ratio
Direction
Normal Speed [m/s]:
Alternate Speed [m/s]:
Acceleration [m/s2]:
Decceleration [m/s2]:
EC5000
50.0
49:1
1.00
0.50
0.00
0.00
CW
CCW
EC5000
50.0
49:1
1.00
0.50
0.00
0.00
CW
CCW
Disabled
50.0
none
1.00
0.50
0.00
0.00
CW
CCW
Disabled
50.0
none
1.00
0.50
0.00
0.00
CW
CCW
Apply Motor 1 Settings to all
Start Delay [ms]:
Avoid parallel Motor Start/Stop - ZPA
100
100Stop Delay [ms]:
28 V
26 VBrake Chopper Level:
ATTENTION
Risque de dysfonctionnement!
¾ Modiez la conguration du moteur via le navigateur Web uniquement lorsque les moteurs sont à l’arrêt!