Goodrive350 IP55 High-ingress Protection Series VFD Function parameter list
-138-
2: AI2
3: AI3
4: Pulse frequency HDIA
5: Modbus/Modbus TCP communication
6: PROFIBUS/CANopen/DeviceNet
communication
7: Ethernet communication
8: Pulse frequency HDIB
9: EtherCAT/PROFITNET/Ethernet IP
communication
10: PLC
11: Reserved
Note: For these settings, 100% corresponds to
the motor rated current.
Source of upper
limit setup of
brake torque
0: Keypad (P03.21)
1–10: the same as P03.18
Set upper limit of
the torque when
motoring via
keypad
This function code is used to set torque limit.
Setting range: 0.0–300.0% (rated motor current)
Set upper limit of
brake torque via
keypad
Flux-weakening
coefficient of
constant-power
zone
Used when asynchronous motor is in
flux-weakening control.
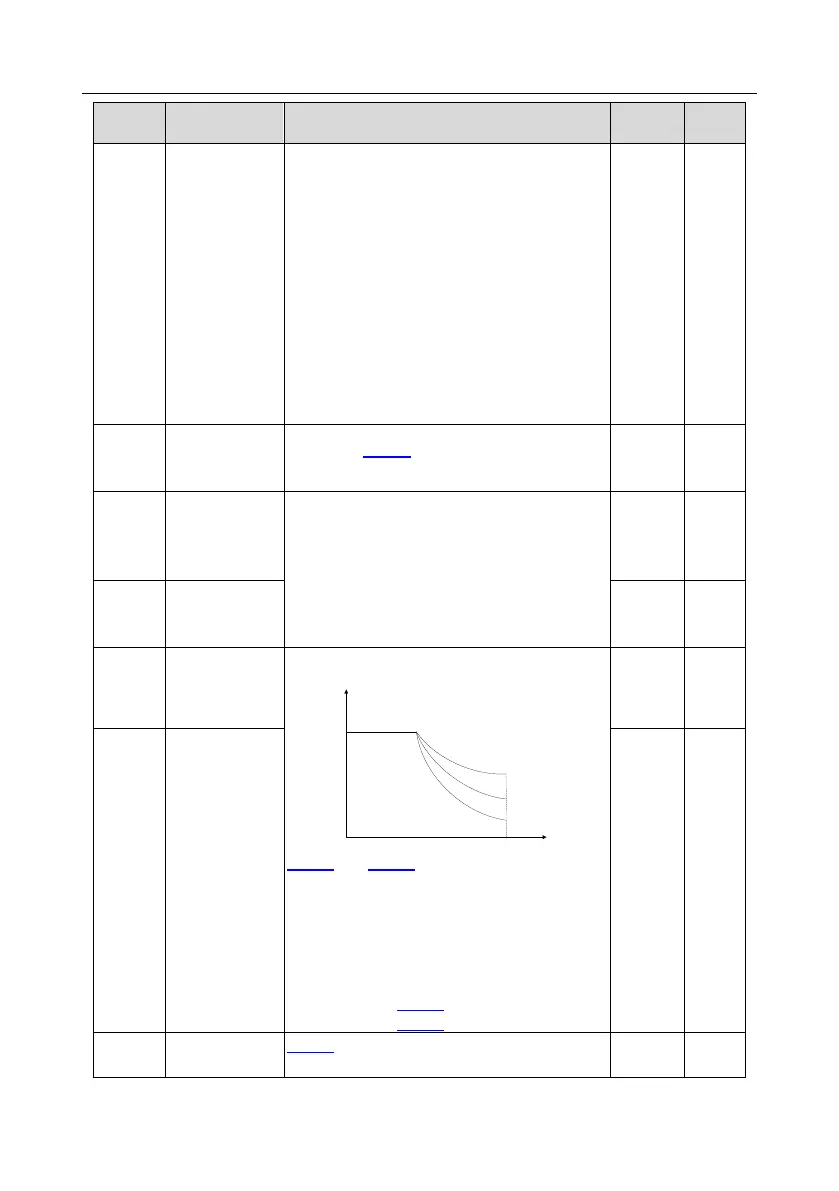
T
f
0.1
Flux-weakening
coefficient of motor
1.0
2.0
Min. flux-weakening limit of motor
P03.22 and P03.23 are valid during constant
power. When motor speed is above rated speed,
motor enters flux-weakening running state. The
flux-weakening control coefficient can change
the flux-weakening curvature, the larger the
coefficient, the steeper the curve, the smaller the
coefficient, the smoother the curve.
Setting range of P03.22: 0.1–2.0
Setting range of P03.23: 10%–100%
Min.
flux-weakening
point of
constant-power
zone
P03.24 sets the max. output voltage of the VFD,
which is the percentage of rated motor voltage.

 Loading...
Loading...