In parameter PS.00 is dened how the maximum prole speed is to be set:
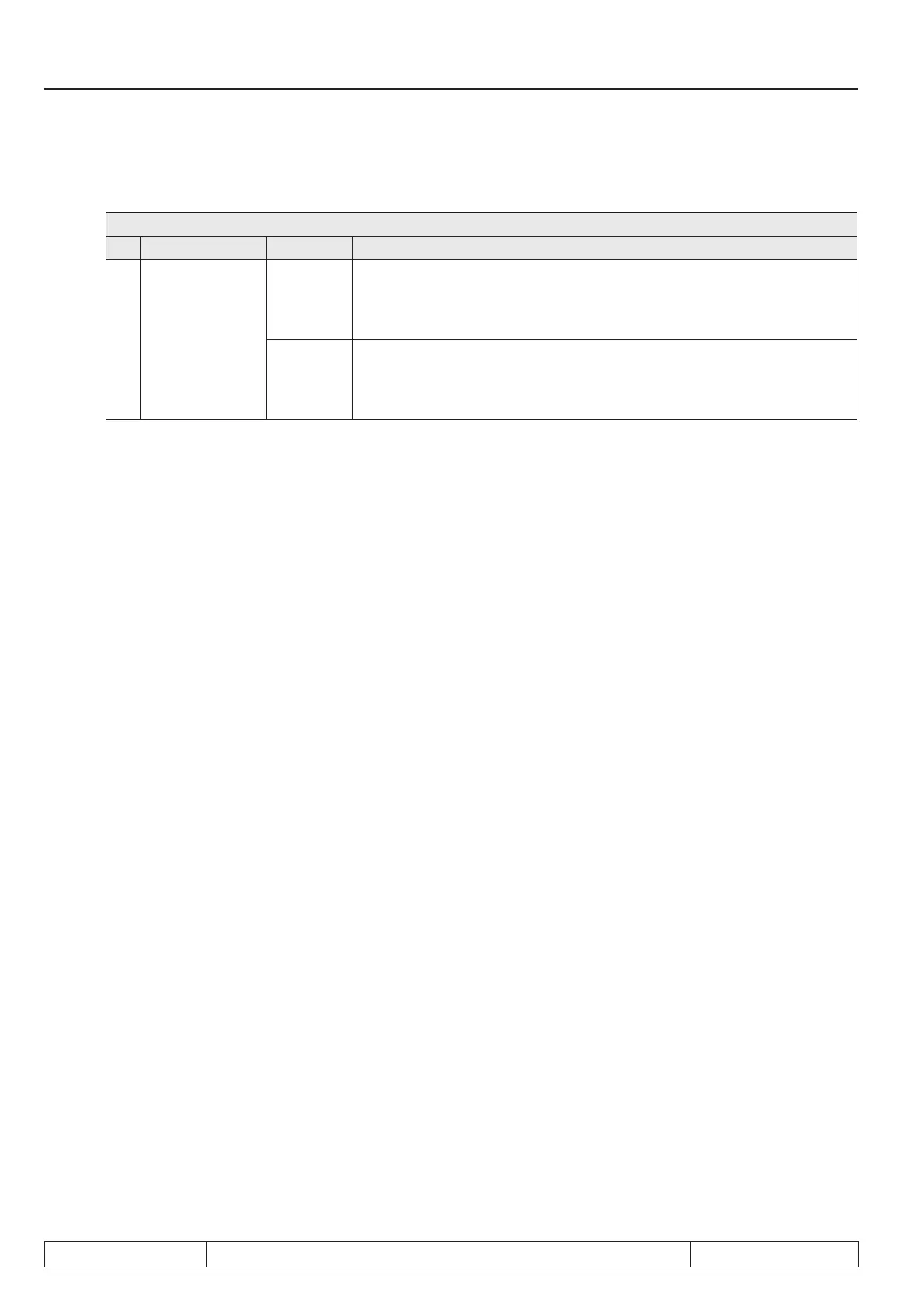
PS.00: Posi / synchronous mode
Bit Meaning Value Explanation
4
Positioning /
target speed
0: PS.25 /
PS.25
The maximum prole speed is set via PS.25 "Index / speed". It is
acquired at the time of the "start positioning" command and can not be
changed thereafter for the positioning in progress. The drive stops at
the target position.
16:
PS.31 /
PS.25
The maximum prole speed is calculated from:
PS.31: "max. speed %" x oP.10: "max.reference forward"
A change of the maximum prole speed during the current positioning
is possible.
Instructions for value 16:
If, during the current positioning, the value of PS.31 or oP.10 changes, the new prole speed is always acquired.
The drive runs (in compliance with the acceleration-, deceleration- and jolt-setpoints) to the new target speed.
The maximum prole speed can be changed by way during running positioning by writing onto PS.31 via the
communication interface.
Alternatively, a change via an analog input is also possible:
For that purpose, enter in parameter An.53 "analog parameter default / source", e.g., the AUX-channel (value =
0), and program the bus address from parameter PS.31 (value = 131Fh) in parameter An.54 "analog parameter
default / target".
Now one can adjust the maximum prole speed via the AUX-input (see also chapter 7.15.9). The parameter
PS.25 must be set to the value "0" , so that the drive stops at the target. If PS.25 contains a value unequal to 0,
the drive reaches this speed at the target position and continues running constantly at that speed.
Page 7.12 - 36 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Posi- and synchronous operating

 Loading...
Loading...

