Rotary table range
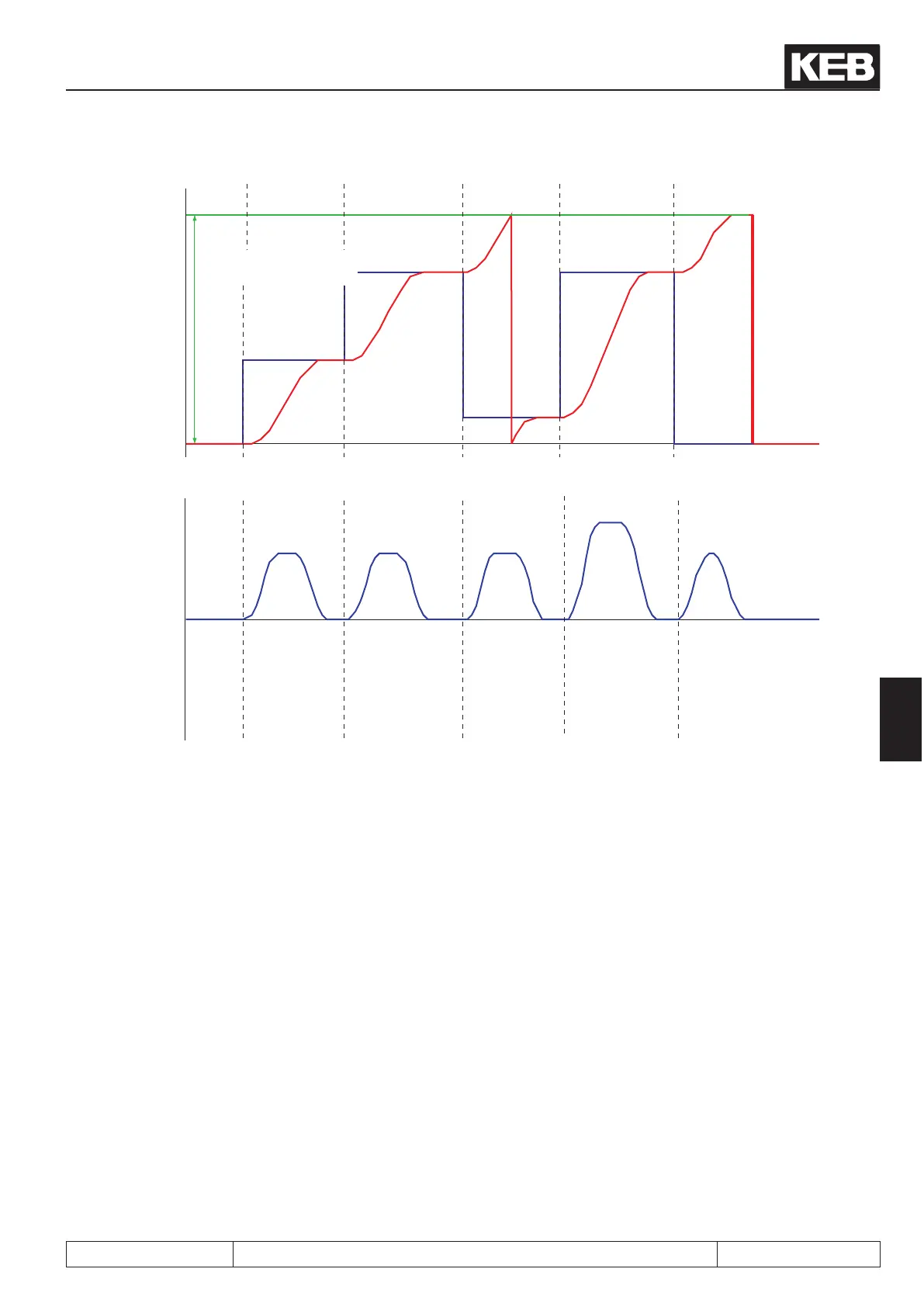
ru.61: Target position ru.56: Set position
ru.02: ramp output display (setpoint speed controller)
In this example, all position setpoint in PS.24 are positive. The position values 0 and PS.39 are identical, there-
fore, the value 0 as well as the value PS.39 can be displayed during traversal of the round table range.
Thereby, apparent jumps can occur in the position values if the display changes between the value 0 and
PS.39.
Rotarytable/yingreferencing
If only one encoder is used, the gear can cause a further problem:
If the gear factor x increments per revolution does not result in an integer value, the value for PS.39 cannot be
set exactly.
Example:
The gear ratio between motor and rotary table is 50 : 3
encoder increments per revolution = 2500 and multiple evaluation = 2: 4-fold
50
——
3
50
——
3
PS.39 = x encoder increments per revolution
x 2
multiple evaluation
=
x 10.000 = 16.666,6666
In PS.39, however, only integer values can be entered. Thereby, one obtains (for predominant motion in one
direction of rotation) an error that increases with each round table revolution.
To correct this error, there is the possibility of ying referencing for round table applications.
Posi- and synchronous operating
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.12 - 55
7

 Loading...
Loading...

