Page 7.15 - 24 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Special functions
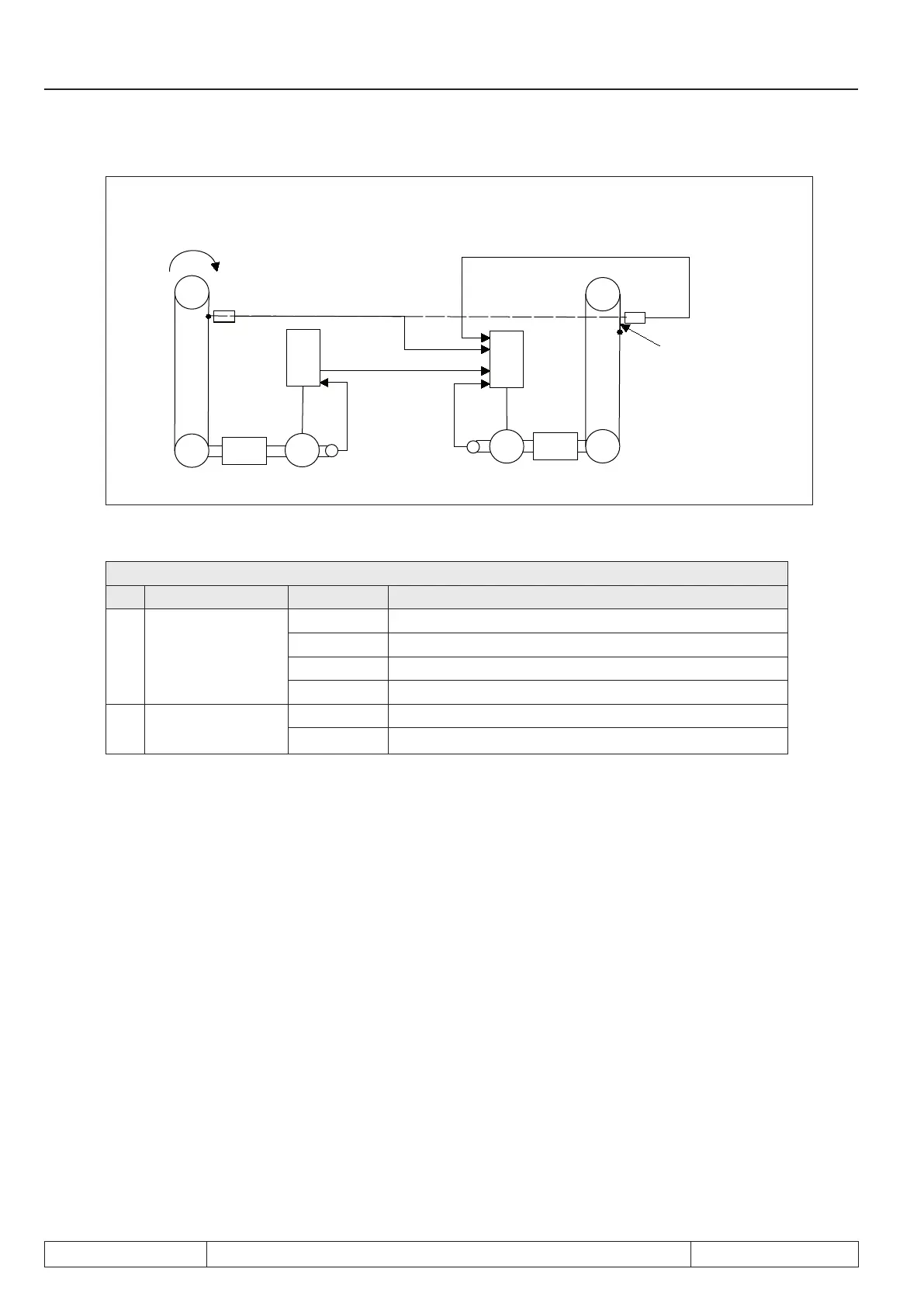
Rotation direction
Initiator
Initiator
Encoder emulation
Encoder
2500 Inc/ rev.
Encoder
2500 Inc/ rev.
Master
Slave
i = 9,8
i = 23
M
M
F5F5
I1
I2
Angle deviation > 0
The register function is activated by parameter „register mode“ (rG.00).
rG.00: Register mode
Bit Meaning Value Function
0 Register mode
0 off
1 on
2 on, teach angle deviation
3 reserved
1
Compensate angle
deviation
0 off
4 on
Both initiator signals must release two times after activation of the register function before the register function
triggers an activity.
The gear factor is calculated from:
register distance master (rG.14), number of increments from main pulse to main pulse
register distance slave (rG.15), number of increments from main pulse to main pulse
numerator, gear factor (channel1(ec.56) or channel2 (ec.58))
denominator, gear factor (channel1(ec.57) or channel2 (ec.59))
i = slave difference / master difference
numerator = i * denominator
If it is switched in a parameter set with rG.00 = Bit 0....1=2, the rst calculated angle deviation between master
and slave is stored in parameter „register angle level 1“ (ps.64) (teachen). The max. angle correction per pe-
riod (rG.02) must be adjusted in order to activate the angle deviation.
The direction of the angle deviation can be adjusted via rG.00 bit 2… 3.
Two interpolation points where the angle deviation via interpolation can be preset dependent on the master
speed can be dened via parameters rG.08, rG.09 and rG.10, rG.11.The angle deviation is constantly dened
via rG.08 with rG.10 = 0 = off. The function of the angle setting is not active at speed left to rG.09 and right to
rG.11.

 Loading...
Loading...

