- 38 -
BASIC OPERATION
SONAR MODE
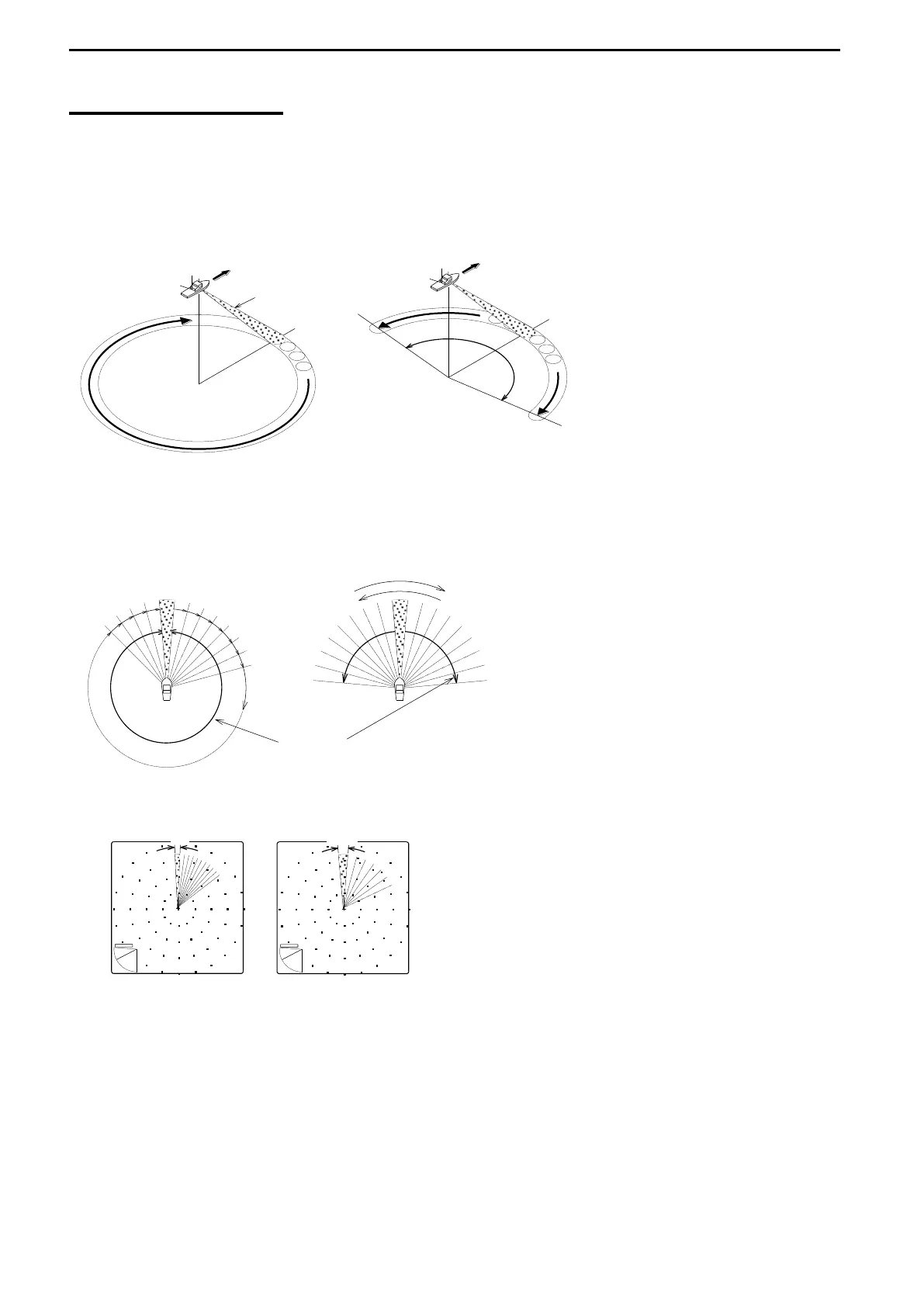
Rotating the transducer in the Transducer unit protruded from the ship’s bottom, the ultra
sound beams are sent out and detects the targets in accordance with the selected speed and
the range (distance).
The reflected sound appears on the PPI depending on the transducer’s sweep.
Adjusting the Tilt and Bearing the sonar beam can be trained from the surface to the bottom.
The transducer rotates with the selected step angle.
The reflected echoes are displayed as the image every step accordingly.
The step angle can be selected in MENU 2 – “STEP (SONAR)”. Refer to page 63
A narrow step gives a more detailed image on the screen, however more sweep time is
requested than a wide step
<to be continued>
4
5
ULTRA SONIC BEAM
SECTOR ANGLE: 360゜
SWEEP DIRECTION: RIGHT
2
3
1
SECTOR ANGLE: 165゜
The transducer emits the
ultra sound beams rotating
the Transducer unit.
Changing the sector angle
makes it possible to detect
in various ranges.
Refer to page 85
The reflected echoes are
displayed accordingly after
emitting the ultra sound
beam from 1 to 8 shown in
the drawing left.