Condition Ladder Diagram Action
Rung-con-
dition-in is
false
Initialize variables and clear timeout.
Instruction
execution
Reset enable bit in the command message to the drive. Then, set the done bit when the dis-
abled response is returned. If the drive has a general fault or there is a communication timeout,
set the error bit.
6.3.5 Changes to Axis Status Bits
Bit Name State Meaning
Enable False Axis is in Disabled state with the servo loop active.
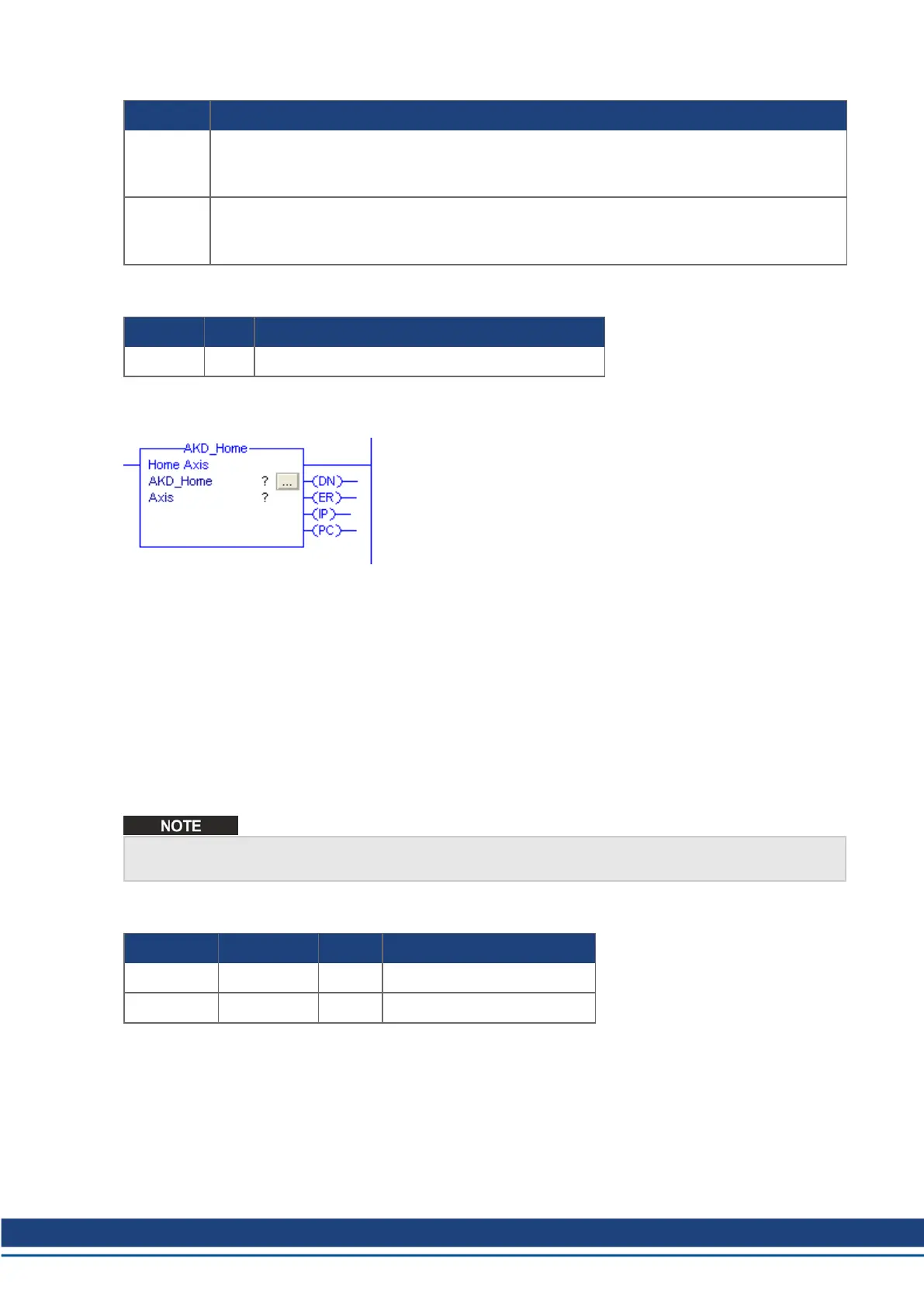
6.4 Motion Axis Home (AKD_Home)
6.4.1 Description
The Motion Axis Home (AKD_Home) instruction triggers the axis to home using the currently configured hom-
ing mode. See the AKD user manual for homing modes and setting instructions. This command triggers the
drive to start the procedure and monitors for the process to complete. Similar to the MAH instruction in Rock-
well drives.
Drive must be enabled in order to execute this instruction.
This is a transitional instruction:
l In ladder diagram, toggle the rung-condition-in from cleared to set each time the instruction should
execute.
The AKD_HOME instruction execution may take multiple scans to execute because it requires transmission
of a message to the motion module and time for the drive to perform the homing procedure.
6.4.2 Operands
Operand Type Format Description
AKD_Home AKD_HOME Tag Control tag for this instruction.
Axis AKD_AXIS Tag The name of the axis to home.
6.4.3 AKD_HOME Structure
Ethernet IP with RSLogix | 6 AKD Instructions
Kollmorgen | kdn.kollmorgen.com | November 2018 33

 Loading...
Loading...







