Ethernet IP with RSLogix | 6 AKD Instructions
Mnemonic Data
Type
Description
.EnableIn BOOL The enable input bit indicates that the instruction is enabled. It remains set until the
instruction completes and the rung-condition-in goes false.
.EnableOut BOOL The enable output bit is the output of the enable input bit.
.DN (Done) BOOL The done bit indicates when the homing instruction completes.
.ER (Error) BOOL
The error bit indicates if the instruction detects an error.
.IP (In Pro-
cess)
BOOL The in process bit is set when the command is enabled and remains true until the
command completes or is terminated.
.PC (Process
Complete)
BOOL The process complete bit is set when the homing command has successfully com-
pleted.
6.4.4 Execution
Condition Ladder Diagram Action
Prescan Initialize variables and clear timeout.
Rung-con-
dition-in is
false
Initialize variables and clear timeout.
Instruction
execution
Set the home command in the command message to the drive. Then, set the done bit when the
command has initiated. The in process bit is set during execution and the process complete bit
is set when the command has successfully completed. If the drive has a general fault or there
is a communication timeout, set the error bit.
6.4.5 Changes to Axis Status Bits
Bit Name State Meaning
Home_Level True Level of home input.
Profile_In_Pro-
gress
True Profile move is in progress (this bit may be set and cleared during instruction
execution).
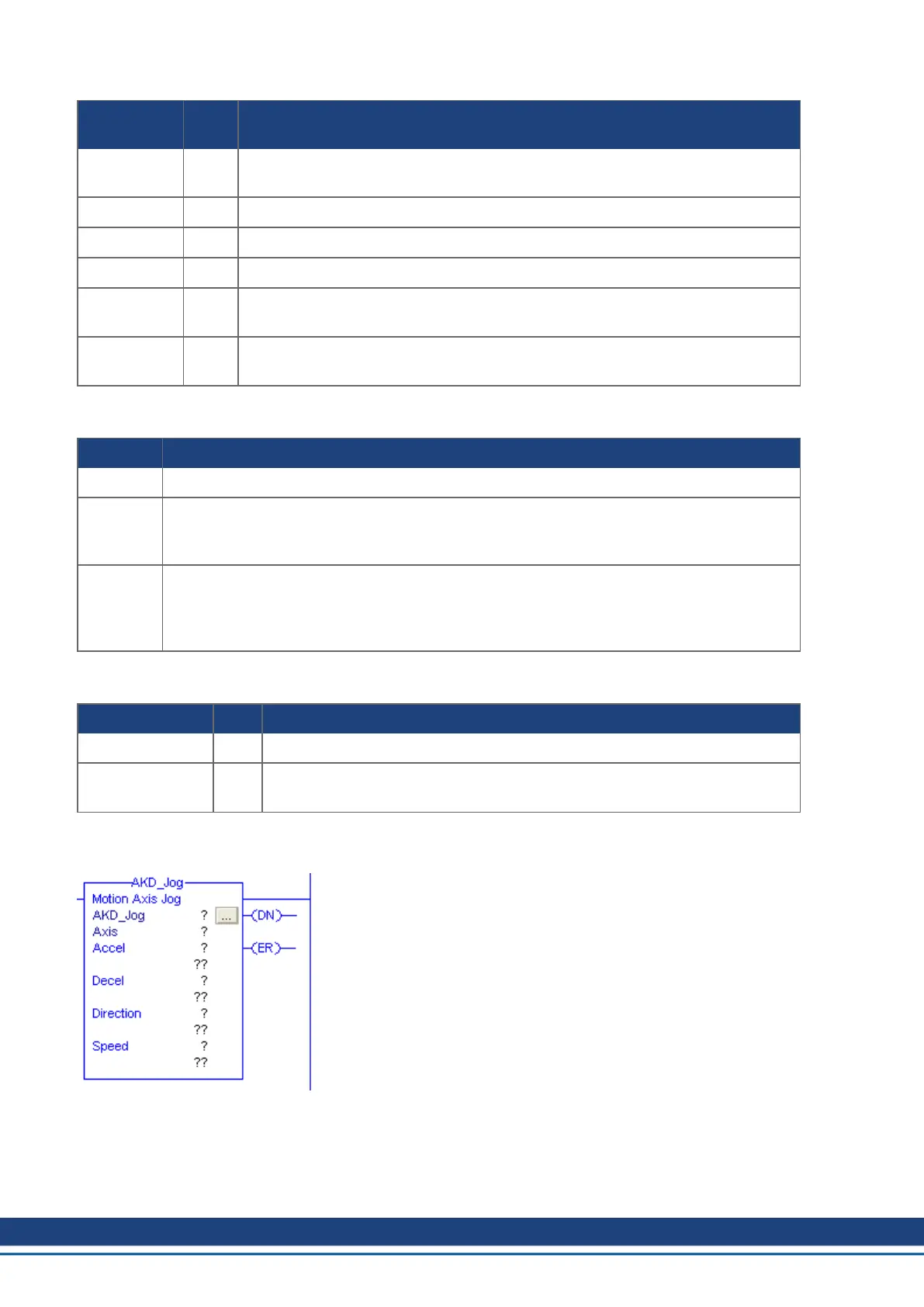
6.5 Motion Axis Jog (AKD_Jog)
6.5.1 Description
34 Kollmorgen | kdn.kollmorgen.com | November 2018

 Loading...
Loading...







