Ethernet IP with RSLogix | 6 AKD Instructions
6.6.4 Programming Guidelines
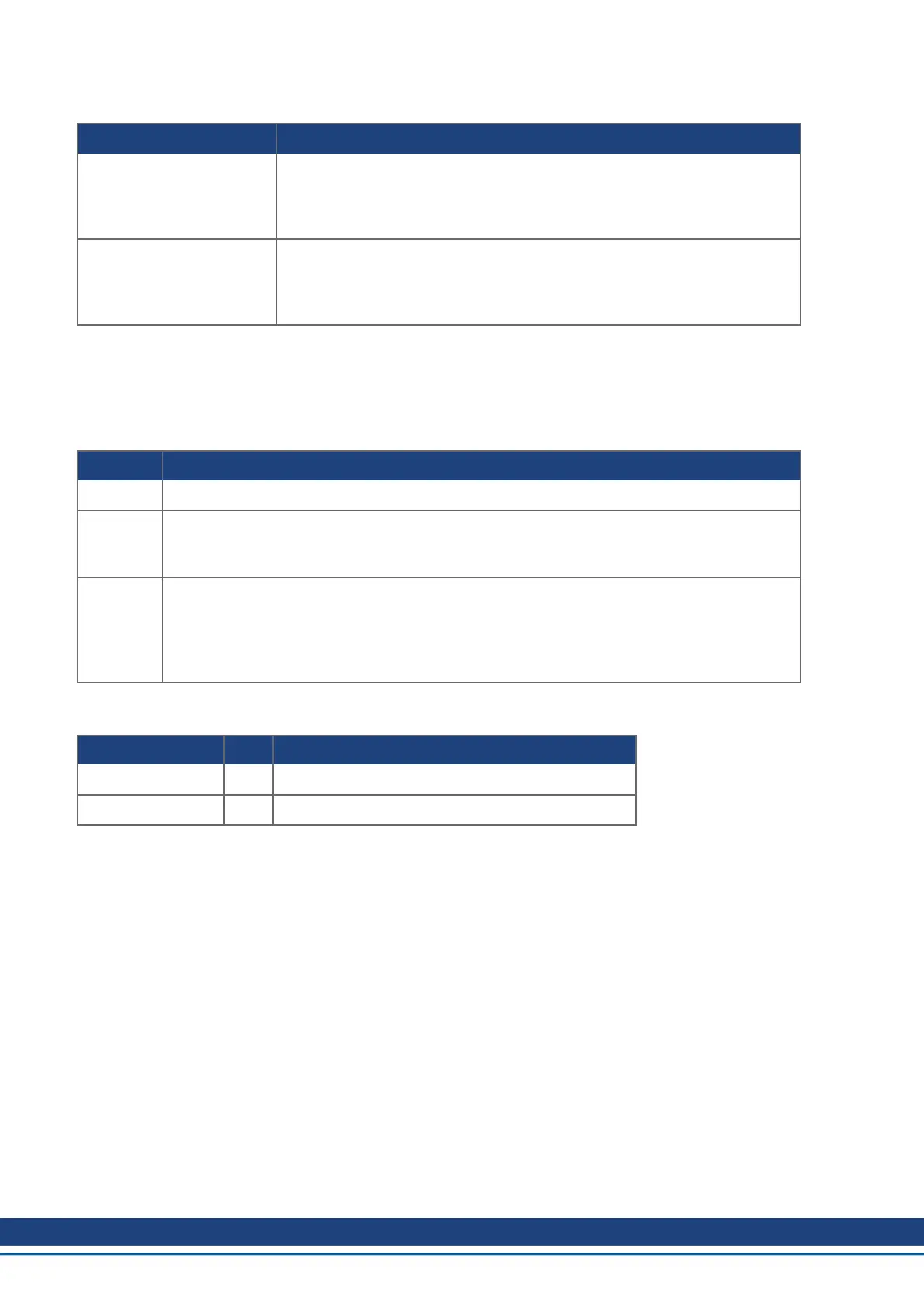
Guideline Details
In ladder diagram, toggle
the rung condition each time
you want to execute the
instruction.
This is a transitional instruction. In ladder diagram, toggle the rung-condition-
in from cleared to set each time you want to execute the instruction.
Use the AKD_Move instruc-
tion to change one that is
already in progress.
You can change the position target, speed, acceleration, or deceleration lim-
its and the change will take place immediately. The axis will move to the
updated position, possibly even changing direction, without stopping at the
old end position.
6.6.5 Choosing a Move Type
See the AKD User Guide for more information on position move types.
6.6.6 Execution
Condition Ladder Diagram Action
Prescan Initialize variables and clear timeout.
Rung-con-
dition-in is
false
Reset in process bit when axis profile is no longer in progress. Set process complete bit when
move command successfully completes.
Instruction
execution
Reset done and error bits, then set accel, decel, speed, and position. Start move and set the
done bit to indicate command started and set the in process bit to indicate that the command is
running. If the motion stops, clear the in process bit. Set process complete bit when move com-
mand successfully completes. If a general fault occurs or there is a communication response
timeout, set the error bit.
6.6.7 Changes to Axis Status Bits
Bit Name State Meaning
Profile_In_Progress True Profile move is in progress.
On_Target_Position True True once current position equals last target position.
38 Kollmorgen | kdn.kollmorgen.com | November 2018

 Loading...
Loading...







