Use the motion axis jog (AKD_Jog) instruction to move the axis at a constant speed until you tell it to stop.
Corresponds to the MAJ instruction in Rockwell drives.
Drive must be enabled and in velocity or position mode in order to execute this instruction. A general status
bit can be used to test if the jog motion is in progress.
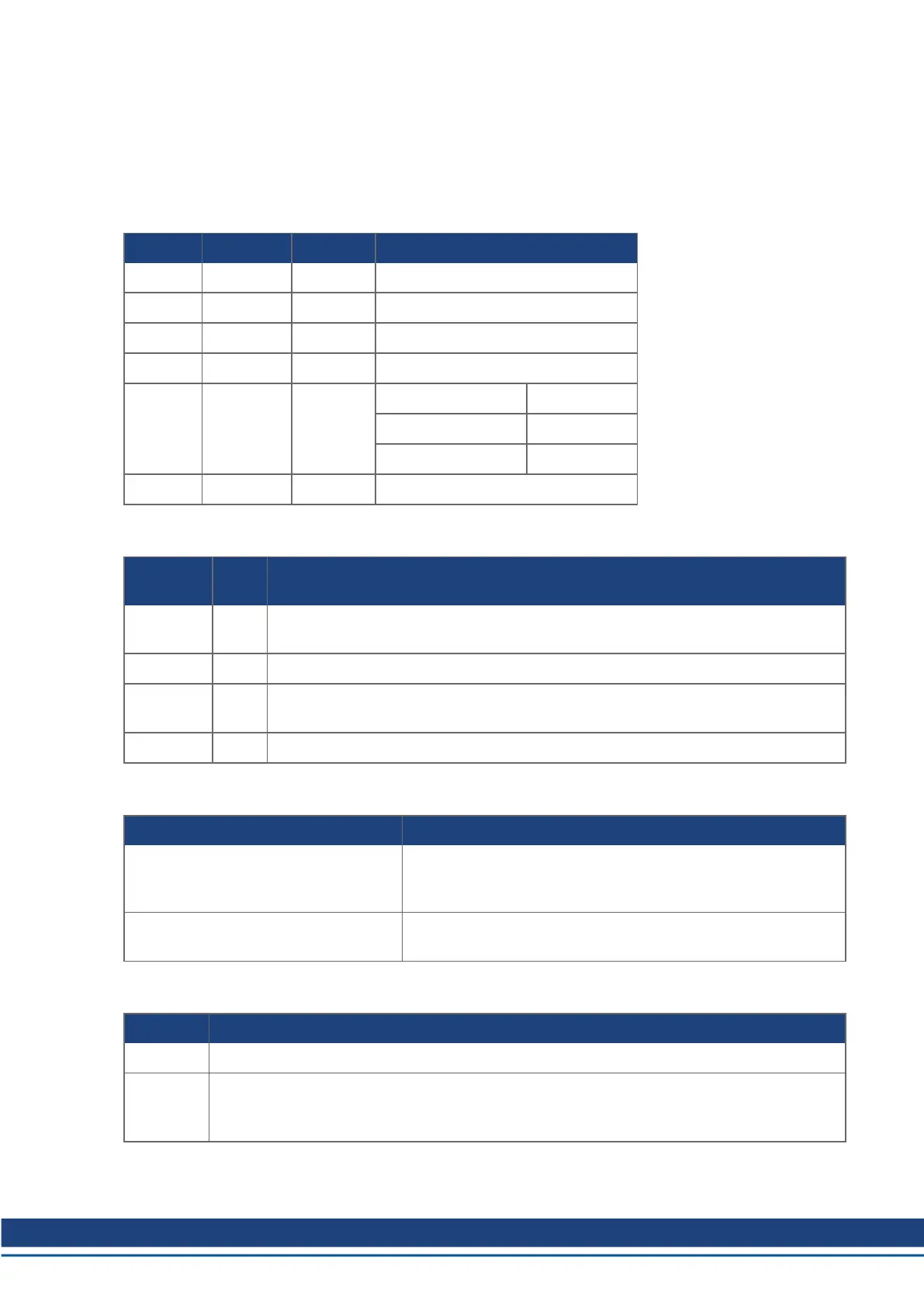
6.5.2 Operands
Operand Type Format Description
AKD_Jog AKD_JOG Tag Control tag for this instruction.
Axis AKD_AXIS Tag The name of the axis to enable.
Accel DINT Immediate Acceleration rate of the axis.
Decel DINT Immediate Deceleration rate of the axis.
Direction DINT Immediate For this jog direction: Enter:
Forward 1
Reverse 0
Speed DINT Immediate Speed to move the axis.
6.5.3 AKD_JOG Structure
Mnemonic Data
Type
Description
.EnableIn BOOL The enable input bit indicates that the instruction is enabled. It remains set until the
instruction completes and the rung-condition-in goes false.
.EnableOut BOOL The enable output bit is the output of the enable input bit.
.DN
(Done)
BOOL The done bit indicates when the jog instruction is successfully initiated.
.ER (Error) BOOL
The error bit indicates if the instruction detects an error.
6.5.4 Programming Guidelines
Guideline Details
In ladder diagram, toggle the rung con-
dition each time you want to execute
the instruction.
This is a transitional instruction. In ladder diagram, toggle the
rung-condition-in from cleared to set each time you want to
execute the instruction.
Use an AKD_Stop_Smooth instruction
to stop the jog.
See the AKD_Stop_Smooth instruction for more details.
6.5.5 Execution
Condition Ladder Diagram Action
Prescan Initialize variables and clear timeout.
Rung-con-
dition-in is
false
Reset in progress bit when axis profile is no longer in progress.
Ethernet IP with RSLogix | 6 AKD Instructions
Kollmorgen | kdn.kollmorgen.com | November 2018 35

 Loading...
Loading...









