6.13 Motion Axis Shutdown (AKD_Shutdown)
6.13.0.1 Description
The motion axis shutdown (AKD_Shutdown) instruction executes a controlled stop, then disables the servo
loop, disables drive output, and places the axis into the Shutdown state. This instruction is also referred to as
a hard stop. The shutdown state disables the drive output and deactivates the servo loop.
Another action initiated by the AKD_Shutdown instruction is the clearing of all motion processes in progress
and the clearing of all the motion status bits. Associated with this action, the command also clears all motion
instruction IP bits that are currently set for the targeted axis.
Another characteristic of the Shutdown state is that any instruction that initiates axis motion is blocked from
execution. Attempts to do so result in an execution error. By executing the Shutdown Reset instruction or dis-
abling and re-enabling the drive motion can be successfully initiated again.
The axis will remain in the shutdown state until a Motion Axis Shutdown Reset (AKD_Shutdown_Reset)
instruction executes or the drive is disabled and re-enabled. Corresponds to the MASD instruction in Rock-
well drives.
The AKD_Shutdown instruction execution may take multiple scans to execute because it requires trans-
mission of a message to the motion module. The Done (.DN) bit is not set immediately, but only after the
shutdown is set.
This is a transitional instruction:
l In ladder diagram, toggle the rung-condition-in from cleared to set each time the instruction should
execute.
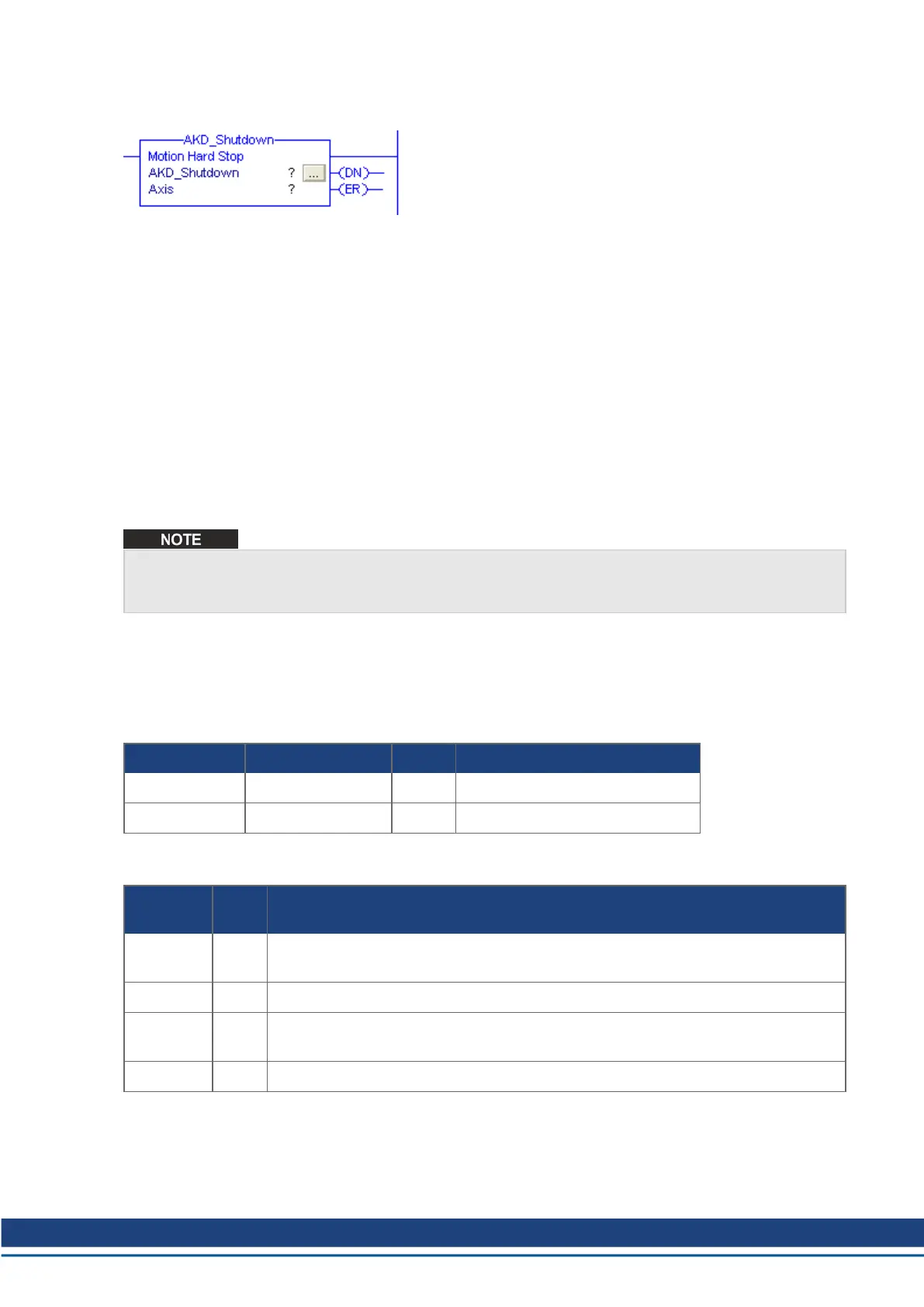
6.13.1 Operands
Operand Type Format Description
AKD_Shutdown AKD_SHUTDOWN Tag Control tag for this instruction.
Axis AKD_AXIS Tag The name of the axis to shut down.
6.13.2 AKD_SHUTDOWN Structure
Mnemonic Data
Type
Description
.EnableIn BOOL The enable input bit indicates that the instruction is enabled. It remains set until the
instruction completes and the rung-condition-in goes false.
.EnableOut BOOL The enable output bit is the output of the enable input bit.
.DN
(Done)
BOOL The done bit indicates when the axis is successfully shutdown.
.ER (Error) BOOL
The error bit indicates if the instruction detects an error.
6.13.3 Execution
Ethernet IP with RSLogix | 6 AKD Instructions
Kollmorgen | kdn.kollmorgen.com | November 2018 51

 Loading...
Loading...









