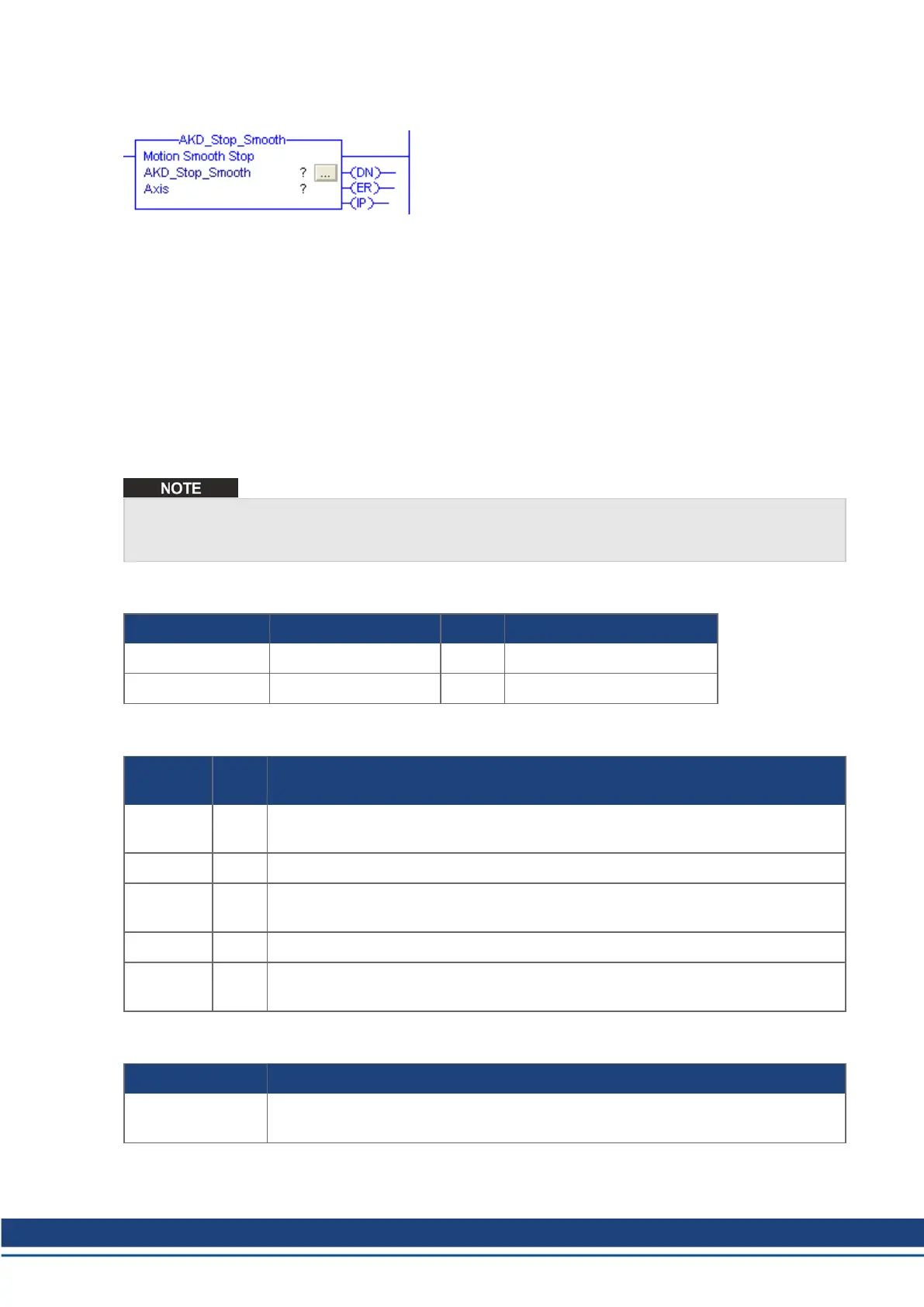
6.15 Motion Axis Smooth Stop (AKD_Stop_Smooth)
6.15.1 Description
Use the motion axis smooth stop (AKD_Stop_Smooth) instruction to end any controlled motion in process for
the axis with a decelerated stop. The instruction stops the motion without disabling the servo loop. This com-
mand defaults to stop at the deceleration rate set for the current motion. Corresponds to the MAS instruction
in Rockwell drives.
Use the instruction to:
l Stop a specific motion process such as jogging or moving
l Stop the axis completely
The AKD_Stop_Smooth instruction execution may take multiple scans to execute because it requires trans-
mission of a message to the motion module and time for the drive to execute the command. The Done (.DN)
bit is set once the motion stops.
6.15.2 Operands
Operand Type Format Description
AKD_Stop_Smooth AKD_STOP_SMOOTH Tag Control tag for this instruction.
Axis AKD_AXIS Tag The name of the axis to stop.
6.15.3 AKD_STOP_SMOOTH Structure
Mnemonic Data
Type
Description
.EnableIn BOOL The enable input bit indicates that the instruction is enabled. It remains set until the
instruction completes and the rung-condition-in goes false.
.EnableOut BOOL The enable output bit is the output of the enable input bit.
.DN
(Done)
BOOL The done bit indicates when the stop command has completed and the motion has
stopped.
.ER (Error) BOOL
The error bit indicates if the instruction detects an error.
.IP (In Pro-
cess)
BOOL The in process bit is set when the command is enabled and remains true until the stop
is complete.
6.15.4 Execution
Condition Ladder Diagram Action
Rung-condition-in
is false
Initialize variables.
Ethernet IP with RSLogix | 6 AKD Instructions
Kollmorgen | kdn.kollmorgen.com | November 2018 55

 Loading...
Loading...







