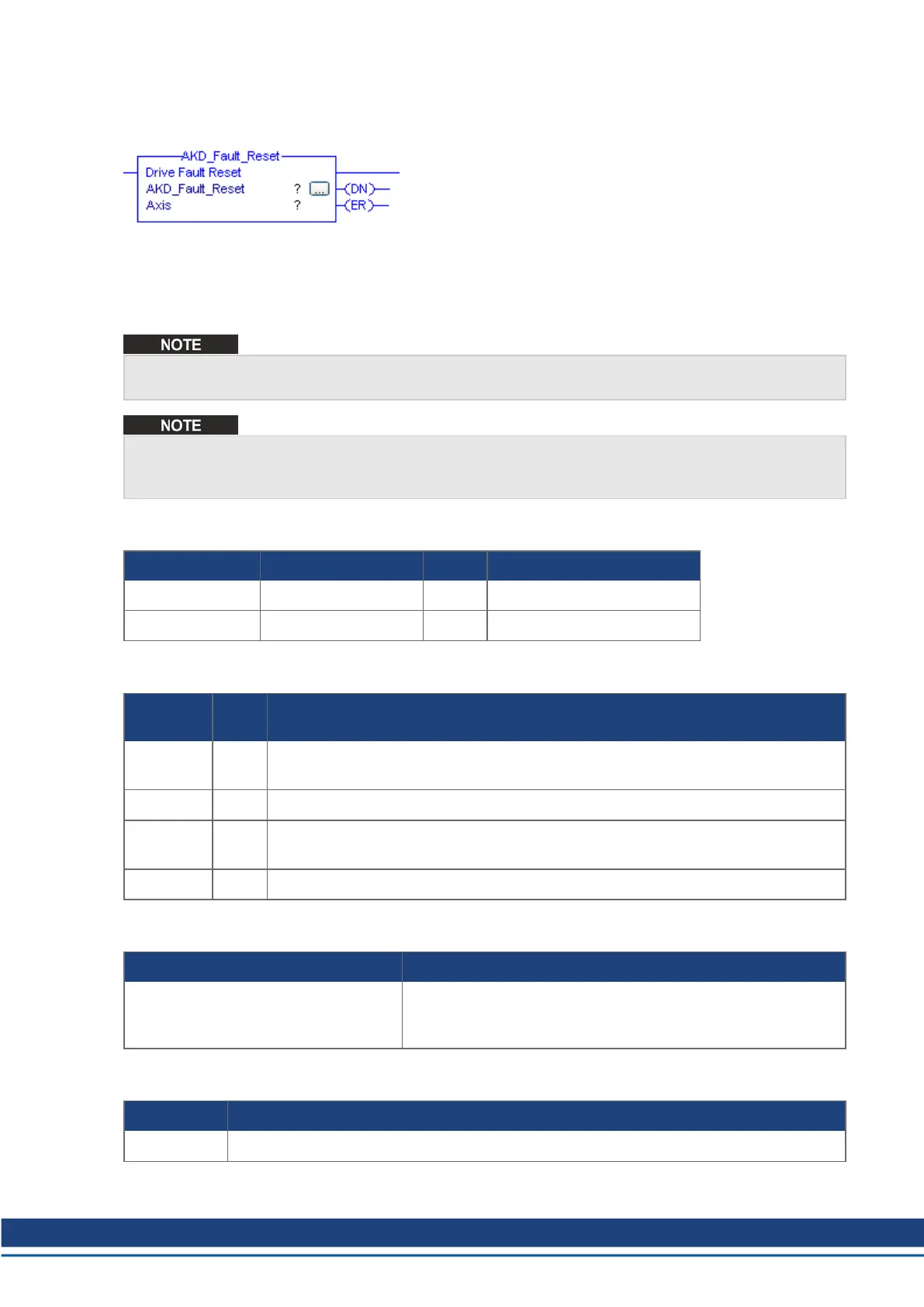
6.22 Fault Reset (AKD_Fault_Reset)
6.22.1 Description
This instruction will attempt to clear faults. The drive must be disabled before executing this instruction.
In most cases, AKD_Shutdown_Reset should be used instead, as it disables the drive and checks that
faults have been cleared successfully.
The AKD_Fault_Reset instruction execution may take multiple scans to execute because it requires trans-
mission of a message to the motion module and time for the drive to execute the command. The Done (.DN)
bit is not set immediately, but only after the faults have been cleared.
6.22.2 Operands
Operand Type Format Description
AKD_Fault_Reset AKD_FAULT_RESET Tag Control tag for this instruction.
Axis AKD_AXIS Tag The name of the axis to reset.
6.22.3 AKD_FAULT_RESETStructure
Mnemonic Data
Type
Description
.EnableIn BOOL The enable input bit indicates that the instruction is enabled. It remains set until the
instruction completes and the rung-condition-in goes false.
.EnableOut BOOL The enable output bit is the output of the enable input bit.
.DN
(Done)
BOOL The done bit indicates when the FaultReset instruction has completed. Check the
General_Fault bit to see if faults were all successfully cleared.
.ER (Error) BOOL
The error bit indicates if the instruction detects an error.
6.22.4 Programming Guidelines
Guideline Details
In ladder diagram, toggle the rung con-
dition each time you want to execute
the instruction.
This is a transitional instruction. In ladder diagram, toggle the
rung-condition-in from cleared to set each time you want to
execute the instruction.
6.22.5 Execution
Condition Ladder Diagram Action
Pre-scan Initialize variables and clear timeout.
Ethernet IP with RSLogix | 6 AKD Instructions
Kollmorgen | kdn.kollmorgen.com | November 2018 69

 Loading...
Loading...







