6.17 Motion Axis Get Parameter (AKD_Get_Parameter)
6.17.1 Description
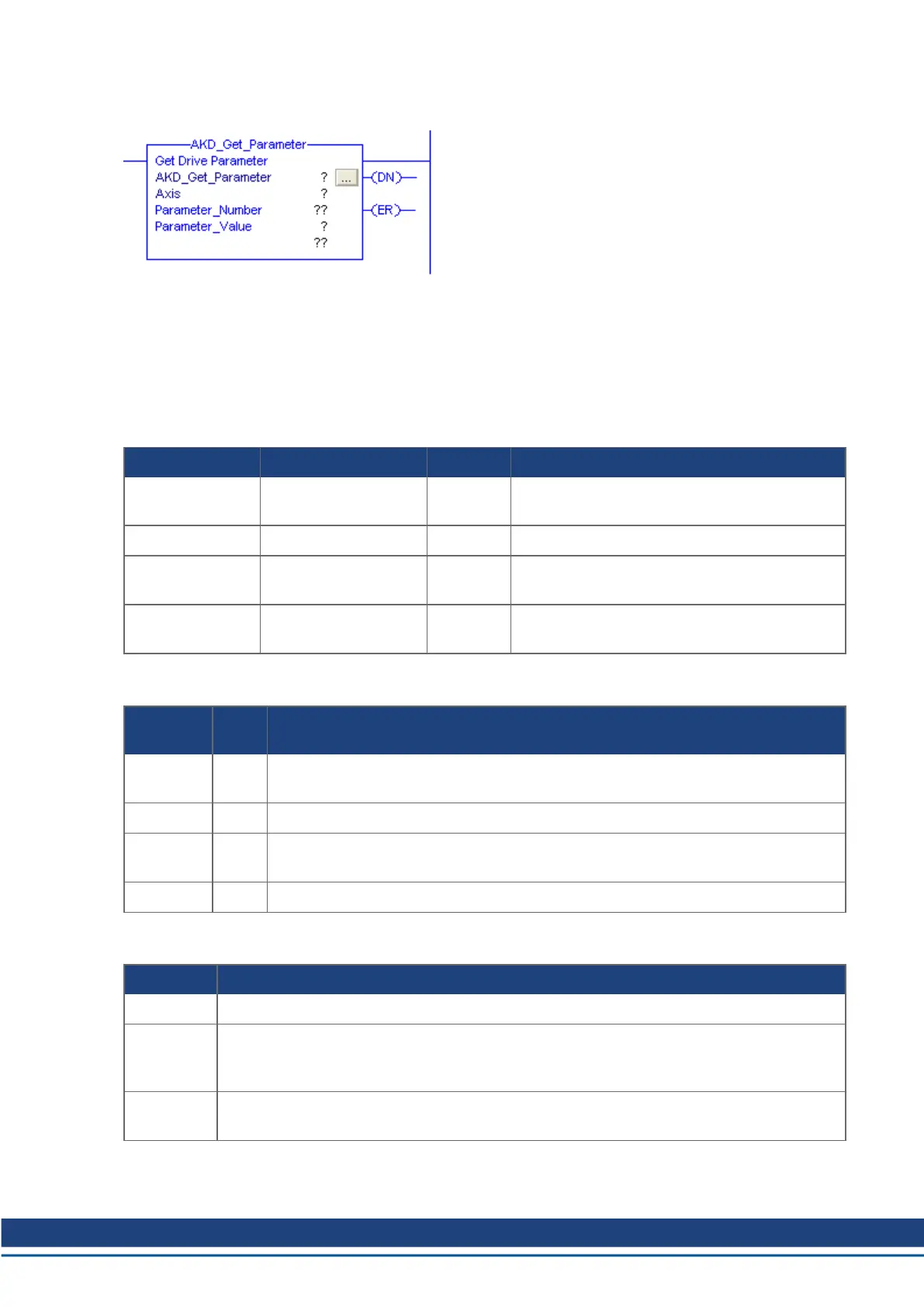
Use the motion axis get parameter (AKD_Get_Parameter) instruction to query a drive parameter from an axis.
The length of time to return the value is highly dependent on the particular parameter. The value will be
latched when the instruction is done. Clear and re-enable the instruction to get an updated value.
6.17.2 Operands
Operand Type Format Description
AKD_Get_Para-
meter
AKD_GET_
PARAMETER
Tag Control tag for this instruction.
Axis AKD_AXIS Tag The name of the axis to query.
Parameter_Num-
ber
INT Immediate (See Appendix B: AKD Parameters)
Parameter_Value DINT Immediate Output tag to which the value of the parameter is
passed.
6.17.3 AKD_GET_PARAMETERStructure
Mnemonic Data
Type
Description
.EnableIn BOOL The enable input bit indicates that the instruction is enabled. It remains set until the
instruction completes and the rung-condition-in goes false.
.EnableOut BOOL The enable output bit is the output of the enable input bit.
.DN
(Done)
BOOL The done bit indicates when the get parameter command has been completed.
.ER (Error) BOOL
The error bit indicates if the instruction detects an error.
6.17.4 Execution
Condition Ladder Diagram Action
Pre-scan Initialize variables and clear timeout.
Rung-con-
dition-in is
false
Initialize variables and clear timeout.
Instruction
execution
Send command to axis to request value. Set done bit and copy response to parameter value
output when axis response is received. If a general fault or timeout occurs, set the error bit.
Ethernet IP with RSLogix | 6 AKD Instructions
Kollmorgen | kdn.kollmorgen.com | November 2018 59

 Loading...
Loading...







