Starting up the device – Basic configuration
Leuze electronic GmbH + Co. KG BPS 348i 61
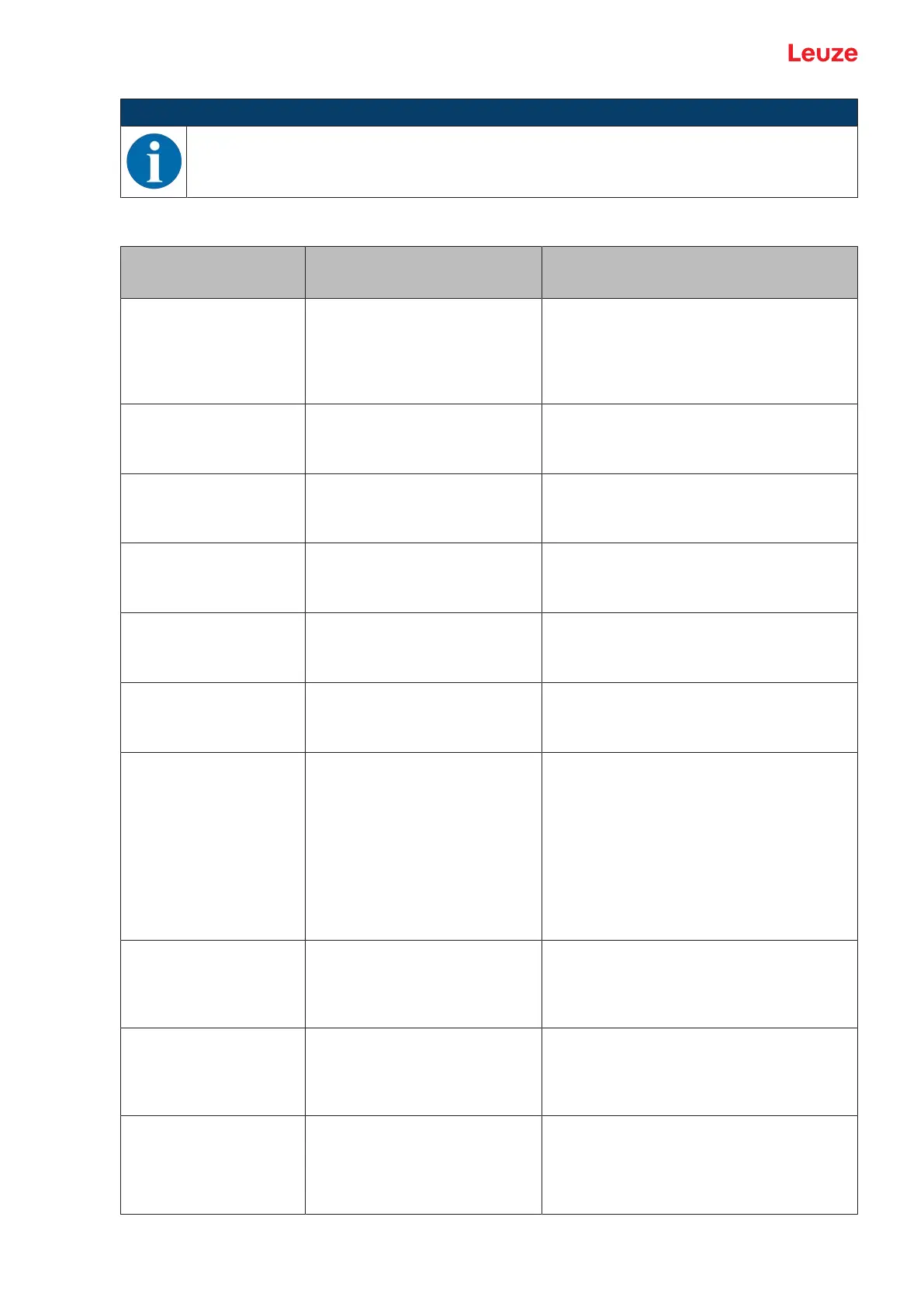
NOTICE
You can find the default values of the BPS in the module descriptions.
8.4.1
Overview of the modules
Module Module name Module contents
(P)=Parameter, (O)=Output, (I)=Input
DAP_001
see chapter 8.4.2
"DAPmodule– perma-
nently defined parame-
ters"
Position value Profile (P), Integration depth (P), Tape se-
lection (P)
M1
see chapter 8.4.3 "Mod-
ule1–Position value"
Position value Sign (P), Unit (P), Position resolution (P),
Counting direction (P), Offset (P), Position
(I)
M2
see chapter 8.4.4 "Mod-
ule2–Static preset"
Static preset Preset value (P), Teach Preset (O), Reset
Preset (O)
M3
see chapter 8.4.5 "Mod-
ule3–Dynamic preset"
Dynamic preset Preset value (P), Teach Preset (O), Reset
Preset (O)
M4
see chapter 8.4.6 "Mod-
ule4–Input/output IO1"
Input/output IO1 Function (P), Activation (P), Output (P), In-
put (P), State (I), Controloutput(O)
M5
see chapter 8.4.7 "Mod-
ule5–Input/output IO2"
Input/output IO2 Function (P), Activation (P), Output (P), In-
put (P), State (I), Controloutput(O)
M6
see chapter 8.4.8 "Mod-
ule6–Status and con-
trol"
Status and control Measurement value invalid/not active (I),
Preset active (I), Teach Preset toggle (I),
Lower/upper position limit value1…2 (I),
Control/marker barcode detected (I), Con-
trol/marker barcode toggle (I), Temperature
warning/error (I) Hardware defect(I), Read-
ing quality warning/Error threshold (I),
Standby active (I), Start/stop measurement
(O), Activate/deactivate Standby (O), Ac-
knowledge control/marker barcode (O)
M7
see chapter 8.4.9 "Mod-
ule7–Position limit
value range1"
Position limit value range1 Upper/Lower pos. limit1 (P)
M8
see chapter 8.4.10 "Mod-
ule8–Position limit
value range2"
Position limit value range2 Upper/Lower pos. limit2 (P)
M9
see chapter 8.4.11 "Mod-
ule9–Error handling
procedures"
Error handling procedures Position value in the case of error (P), Sup-
press position state (P), Error delay/error
delay time (position) (P), Speed in the case
of error (P), Suppress speed state (P), Error
delay/error delay time (speed) (P)