10. Safety system
MiR1000 User Guide (en) 12/2020 - v.1.4 ©Copyright 2019-2020: Mobile Industrial Robots A/S. 88
If the robot detects instability, it is immediately brought into Protective stop. This ensures
that the robot cannot drive if it has lost control of the speed of each drive wheel.
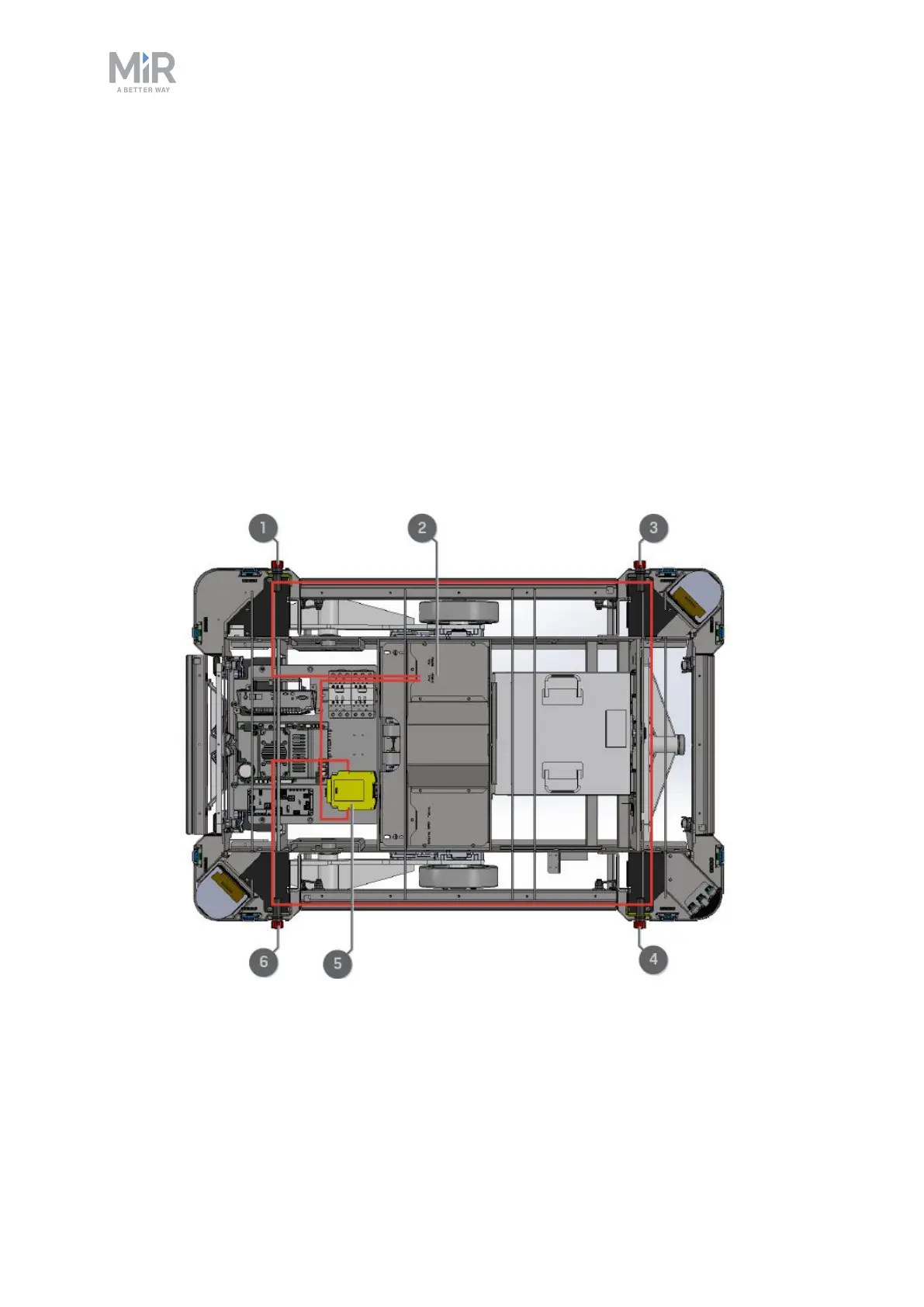
10.5 Emergency stop buttons
There are four Emergency stop buttons on MiR1000. When one of the buttons is pressed, it
breaks the Emergency stop circuit, triggering an Emergency stop. The Emergency stop
circuit runs all of the Emergency stop buttons and connects to the safety PLC through the
Auxiliary emergency stop interface—see Figure 10.7.
You must connect a circuit to the Auxiliary emergency stop interface that closes the circuit
before the robot can operate. If you mount a top module to the robot that has Emergency
stop buttons, you can connect these buttons to the circuit, so MiR1000 enters Emergency
stop when the buttons on the top module are pressed.
Figure 10.7. The Emergency stop circuit in MiR1000.