10. Safety system
MiR1000 User Guide (en) 12/2020 - v.1.4 ©Copyright 2019-2020: Mobile Industrial Robots A/S. 93
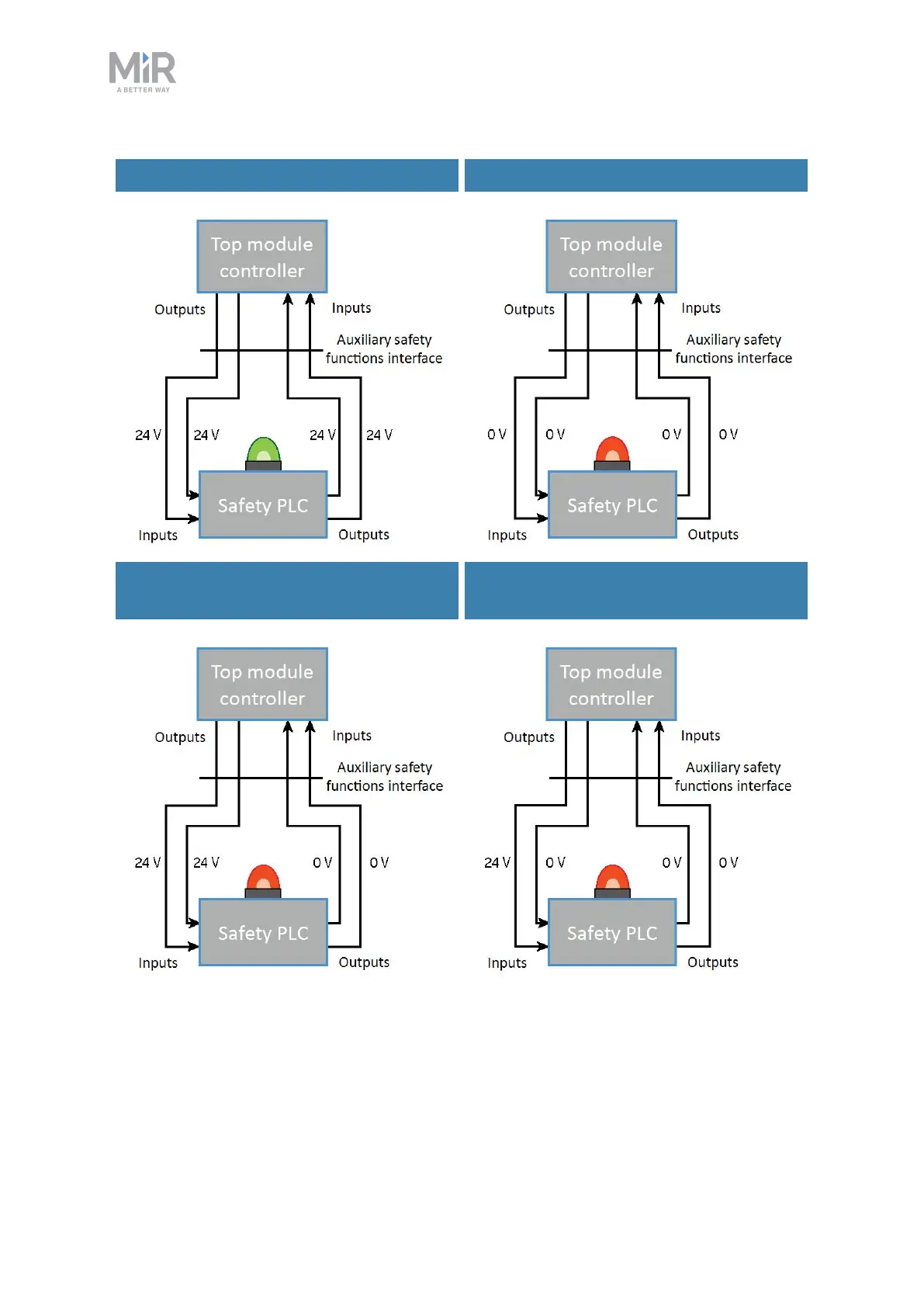
Not in Emergency stop Shared emergency stop inputs are 0 V
Emergency stop button on robot is
pressed
Shared emergency stop inputs are
unequal
Figure 10.11. There are four cases described above.They illustrate respectively: 1. the robot is not in
Emergency stop so the output is 24 V, 2. the robot is in Emergency stop because it receives 0V input from the
Shared emergency stop interface, 3. the robot is in Emergency stop because an Emergency stop button has
been pressed, 4. the robot is in Emergency stop because the inputs are unequal.