8 Pulse Outputs
8-24
CJ2M CPU Unit Pulse I/O Module User’s Manual
The pulse outputs are used by executing pulse control instructions in the ladder program.
z Applicable Instructions
The following instructions are used.
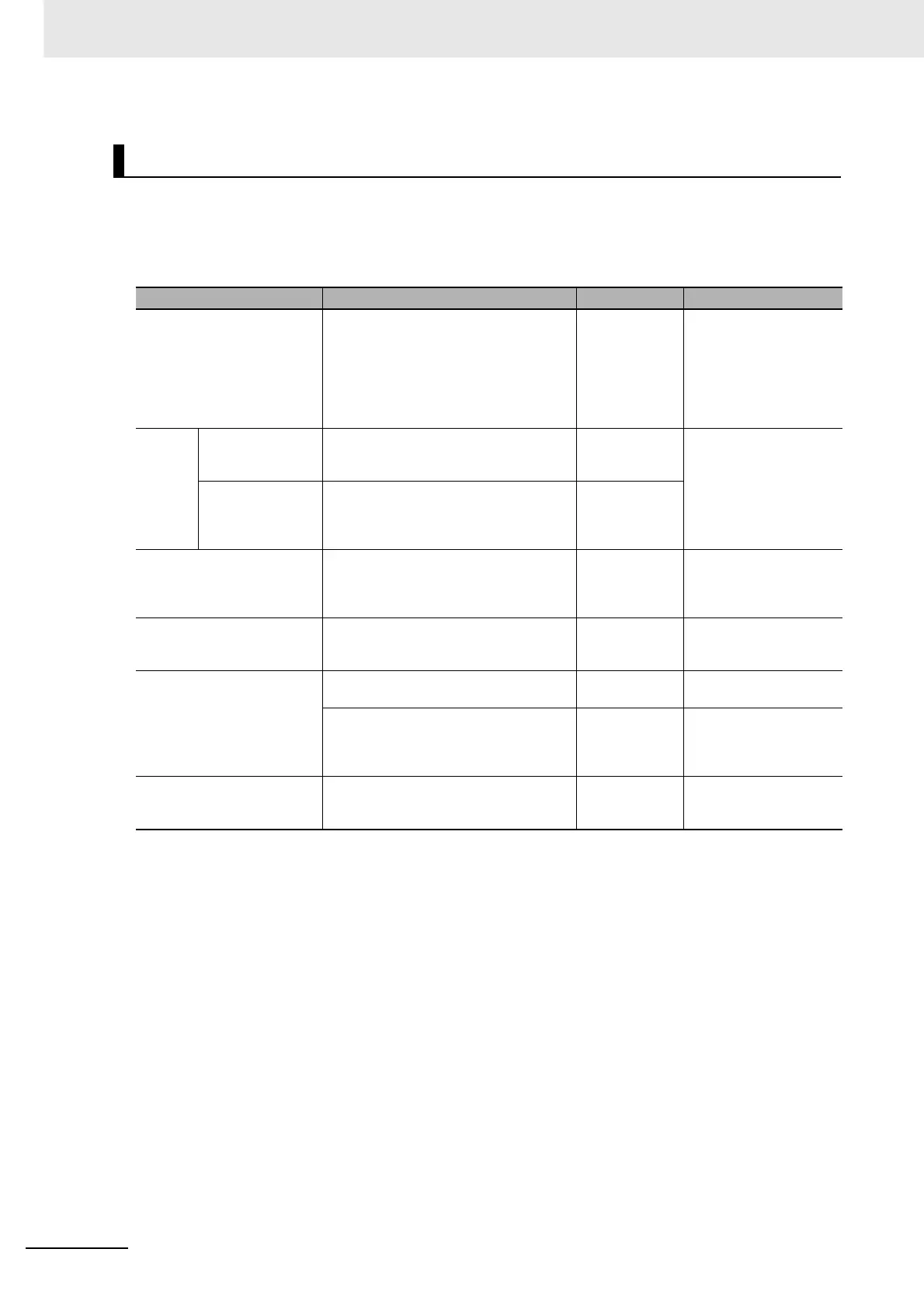
Executing Pulse Control Instructions in a Ladder Program
Purpose Overview Instruction Reference
Performing trapezoidal or S-
curve control
Performs trapezoidal or S-curve pulse out-
put control with independent acceleration
and deceleration rates. (The number of
pulses can be set.)
ACC(888)
(ACCELERA-
TION CON-
TROL)
PLS2(887)
(PULSE OUT-
PUT)
Refer to 8-2 Position Con-
trol
Jogging Without accelera-
tion and decelera-
tion
Performs pulse output control without accel-
eration or deceleration.
SPED(885)
(SPEED OUT-
PUT)
Refer to 8-3 Jogging
With acceleration
and deceleration
Performs trapezoidal pulse output control
with the same acceleration and deceleration
rates.
ACC(888)
(ACCELERA-
TION CON-
TROL)
Performing origin searches Actually moves the motor with pulse outputs
and defines the machine origin based on
the origin proximity input and origin input
signals.
ORG(889) (ORI-
GIN SEARCH)
Refer to 8-5-4 Origin
Search Instructions
Performing origin returns Returns to the origin position from any posi-
tion.
ORG(889) (ORI-
GIN SEARCH)
Refer to 8-6 Reading the
Pulse Output Present
Value
Changing or reading the pulse
output PV
Changes the PV of the pulse output. (This
operation defines the origin location.)
INI(880) (MODE
CONTROL)
Refer to 8-5-7 Changing
the PV of the Pulse Output
Reads the PV of the pulse output PRV(881)
(HIGH-SPEED
COUNTER PV
READ)
Refer to 8-6 Reading the
Pulse Output Present
Value
Performing interrupt feeding
without using interrupt tasks
If an interrupt input occurs, the motor moves
the amount specified by the pulses, deceler-
ates, and stops.
IFEED(892)
(INTERRUPT
FEEDING)
Refer to 8-4 Implementing
Interrupt Feeding
 Loading...
Loading...




