• The inverter may not provide sufficient performance characteristics if the motor is two or more sizes
smaller than the maximum applicable motor capacity. This is because the inverter requires a current
accuracy of at least 50% of the rated current.
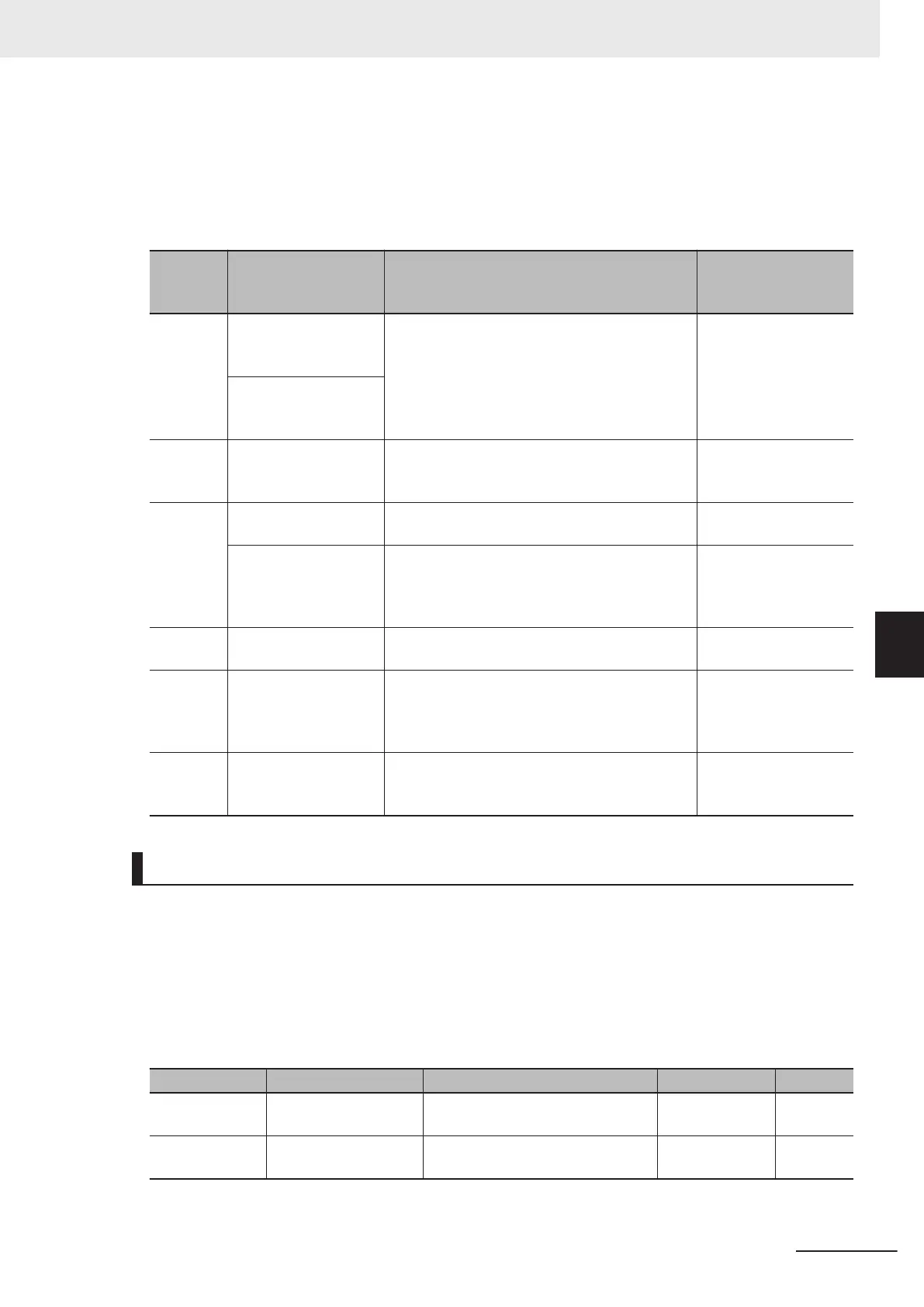
• If sensorless vector control does not provide the intended performance characteristics, adjust the
motor parameters depending on the phenomenon, as shown in the following table.
Opera-
tion sta-
tus
Phenomenon Description of adjustment Adjustment item
Power
running
Actual motor speed is
lower than target
speed.
Increase the slip compensation gain (drive) or
rated slip gradually.
P09/A23
P12/A26
Actual motor speed is
higher than target
speed.
Regener-
ation
Torque is insuf
ficient at
low frequencies (a few
Hz).
Increase %R1 and no-load current gradually. P07/A21
P06/A20
During
startup
Shock occurs during
startup.
Adjust the speed control P gain. d03/A45
Motor rotates momen-
tarily in opposite direc-
tion to instructed rota-
tional direction.
Set rotational direction limitation. H08
At decel-
eration
Motor is hunting.
Adjust the speed control P gain. d03/A45
During
torque
limit
Torque becomes insuf-
ficient at low frequen-
cies when torque limit
is enabled.
Decrease the torque limit. F40
F41
E16
E17
Low fre-
quency
operation
Rotation is unstable.
Adjust the speed control P gain. d03/A45
Output Torque Monitor Function
This function monitors the output torque value.
T
o monitor the output torque value on the Digital Operator
, either set Operator Display Selection dur-
ing Run (E43) to “8: Calculated torque,” or monitor in monitor mode 3_04.
When monitoring by a signal on the control terminal block, refer to 7-3-5
Analog Output Function Se-
lection on page 7-46.
Parameter No. Function name Data Default data Unit
E43
Operator Display Se-
lection during Run
8: Calculated torque
0 -
F31
Output Terminal [AO]
Function Selection
4: Output torque
29: Output torque (Bipolar)
0 -
6 Vector Control and Applied Functions
6-19
M1 Series Standard Type User's Manual (I669)
6-3 Sensorless Vector Control
6
6-3-3 Adjustments for Sensorless Vector Control

 Loading...
Loading...








