ON OFF
OFF
OFF
OFF
OFF
ON
O
N
ON
ON
ON
OFFOFF
OFF
OFF
OFF
OFF
OFF
ON ON
ON
ON
ON
ON
ON
ON
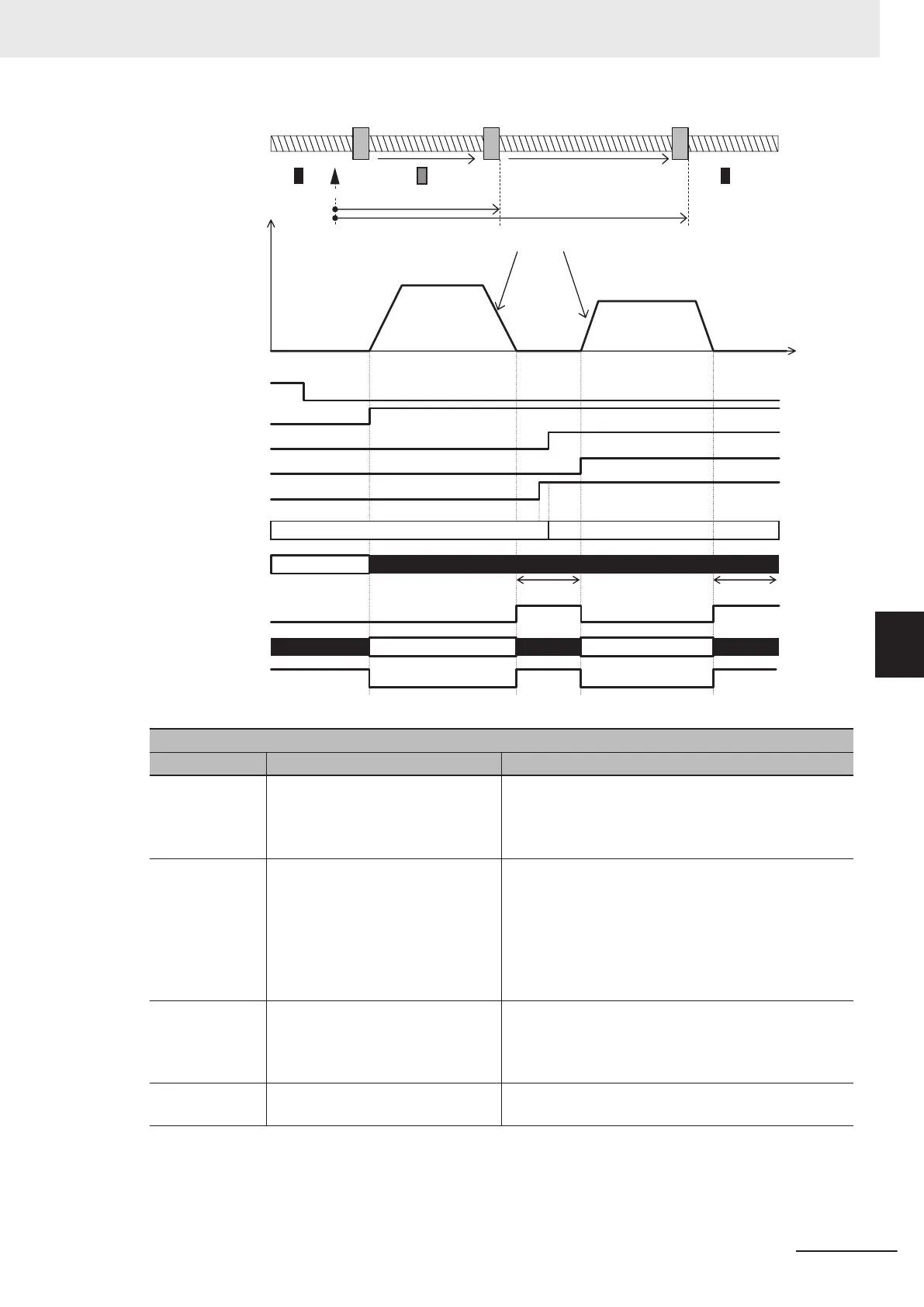
+OT
-OT
Origin
Origin LS
Positioning data 1
Frequency
Deceleration Time
[F08, E11, E13, E15]
Positioning frequency
(Frequency reference set in F01)
Positioning frequency
(Select multi-step frequency 1)
Acceleration Time
[F07, E10, E12, E14]
Positioning data 2
Time
Position
control
Data 1
Data 2
Timer
Servo lock timeServo lock time
[SPD]
[FW]
[POS-SET]
[CF1]
[CP1]
[POK]
Brake status
[P-SEL]
Deceleration Time
[F08, E11, E13, E15]
Acceleration Time
[F07, E10, E12, E14]
Positioning Data 2
[d246, d247]
Positioning Data 1
[d244, d245]
Positioning
data
Inverter
output status
(3)
(3)
(2)(2)
(2)
(1)
(1)
List of input terminal functions
Data Terminal function Description
42 ORL: Origin search limit signal
The return-to-origin operation is as follows: After
“ORL” is turned ON during return-to-origin operation,
movement is made by the homing offset from the initial
Z phase of the PG, and movement is stopped.
119
P-SEL: ASR integral term cancella-
tion
When “P-SEL” is turned ON, the integral term of the
speed controller is canceled and P operation is per-
formed. When the mechanical brake is applied during
position control, the motor cannot rotate even if there
exists position error. For this reason, the integral term
accumulates which sometimes causes an overload trip
to occur. In such a case, use this function.
135
INC/ABS: Increment/absolute posi-
tion switching
When “INC/ABS” turns ON, the positioning data is tak-
en as the absolute position from the current position.
When “INC/ABS” turns OFF, the positioning data is
taken as the absolute position from the origin.
136 OR
T: Orientation command
Orientation operation is started when “ORT” is turned
ON.
6 Vector Control and Applied Functions
6-37
M1 Series Standard Type User's Manual (I669)
6-7 Position Control
6
6-7-1 Basic Operation

 Loading...
Loading...








