Set the gain for the position control of the servo lock by Servo Lock Gain (J97). The behavior of stop-
ping the inverter during a servo lock, and the axial holding force can be adjusted.
When setting smaller value to J97, the response is delayed, but the behavior becomes smoother and
the axial holding force is reduced. When setting larger value, the response becomes faster, but hunt-
ing increases and the axial holding force also increases.
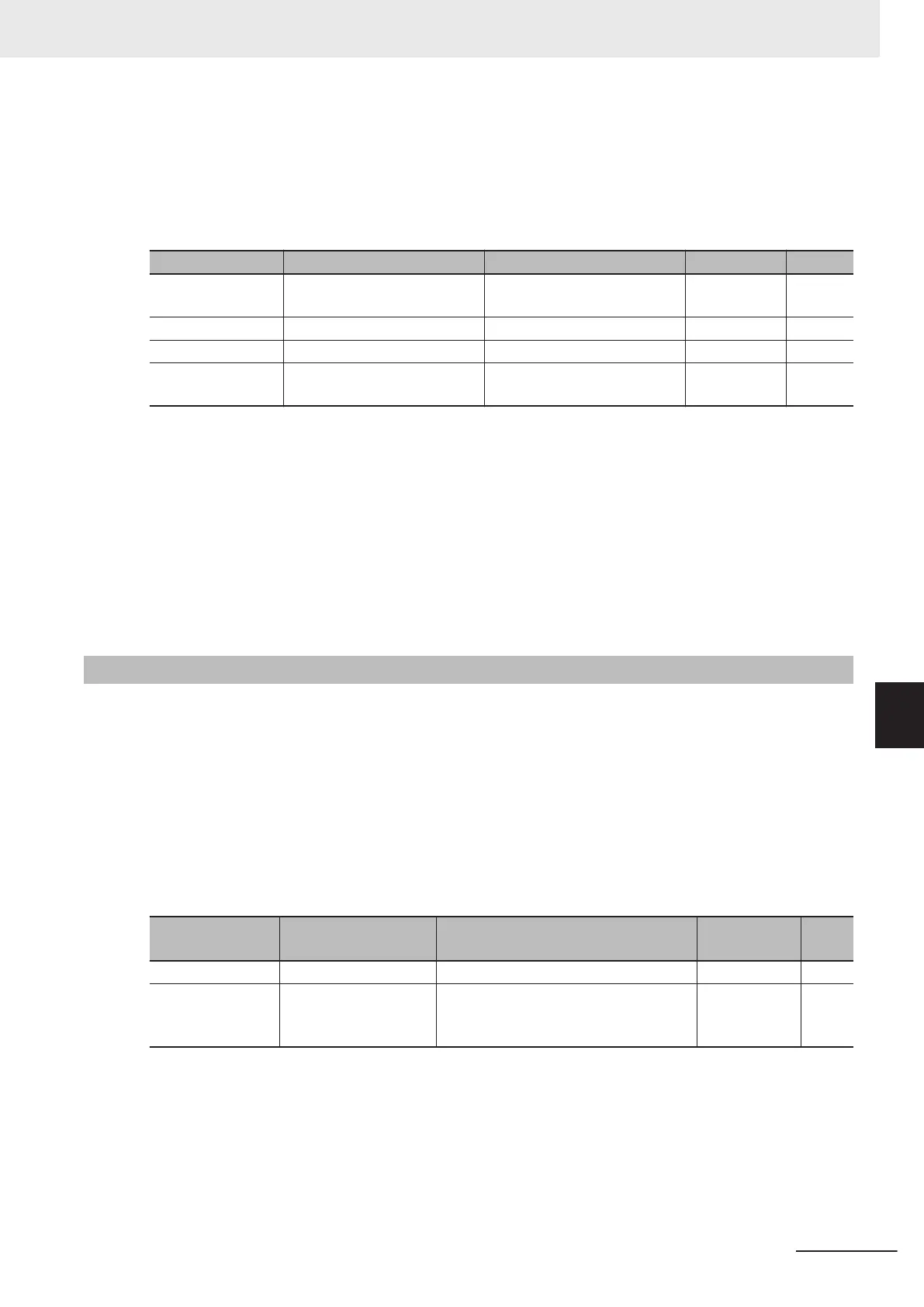
Parameter No. Function name Data Default data Unit
E01 to E05, E98,
E99
Input Terminal [DI1] to [DI7]
Function Selection
47: LOCK (Servo lock com-
mand)
- -
J97 Servo Lock Gain 0.000 to 9.999 0.010 time
J98 Servo Lock Completion Timer 0.000 to 1.000 0.1 s
J99
Servo Lock Completion
Range
0 to 9999 10 Pulse
• When the servo lock command is ON, the voltage is output to the output terminals [U], [V] and [W] of
the inverter even if the RUN command has not been turned ON.
• During a servo lock, if the position error becomes four rotations or more by motor shaft conversion,
the position control error Ero is output.
• With the servo lock function, as control is started from the 1st Stop Frequency (F25) or less, adjust
1st Stop Frequency (F25) and Gain (J97) to satisfy the following formula:
1st Stop Frequency (F25) < (4 × Gain (J97) × Maximum output frequency)
•
If servo lock control is enabled, the stop frequency continuation operation and rotational direction
limitation are disabled.
7-9-20
Droop Control
If a single mechanical system is driven by multiple motors, and there is a speed difference in each of
the motors, a load unbalance occurs. Droop control is a function for ensuring load balance by provid-
ing drooping characteristics to the motor speed in response to an increase in load.
When the output torque is 100%, the output frequency is subtracted by the frequency set at Droop
Control (H28), and when the output torque is 0%, the output frequency is subtracted as a percentage
that is output according to the frequency reference in accordance with the torque actually being output
by the inverter (“T
orque Value” (M07)).
The set value of Droop Control (H28) is around the rated slip frequency of the applicable motor.
T
o enable droop control, turn the DROOP terminal ON.
Parameter No. Function name Data
Default
data
Unit
H28 Droop Control -60.0 to 0.0 0 Hz
E01 to E05, E98,
E99
Input Terminal [DI1] to
[DI7] Function Selec-
tion
76: DROOP (Select droop control) - -
7 Other Functions
7-149
M1 Series Standard Type User's Manual (I669)
7-9 Other Operation Functions
7
7-9-20 Droop Control
 Loading...
Loading...









