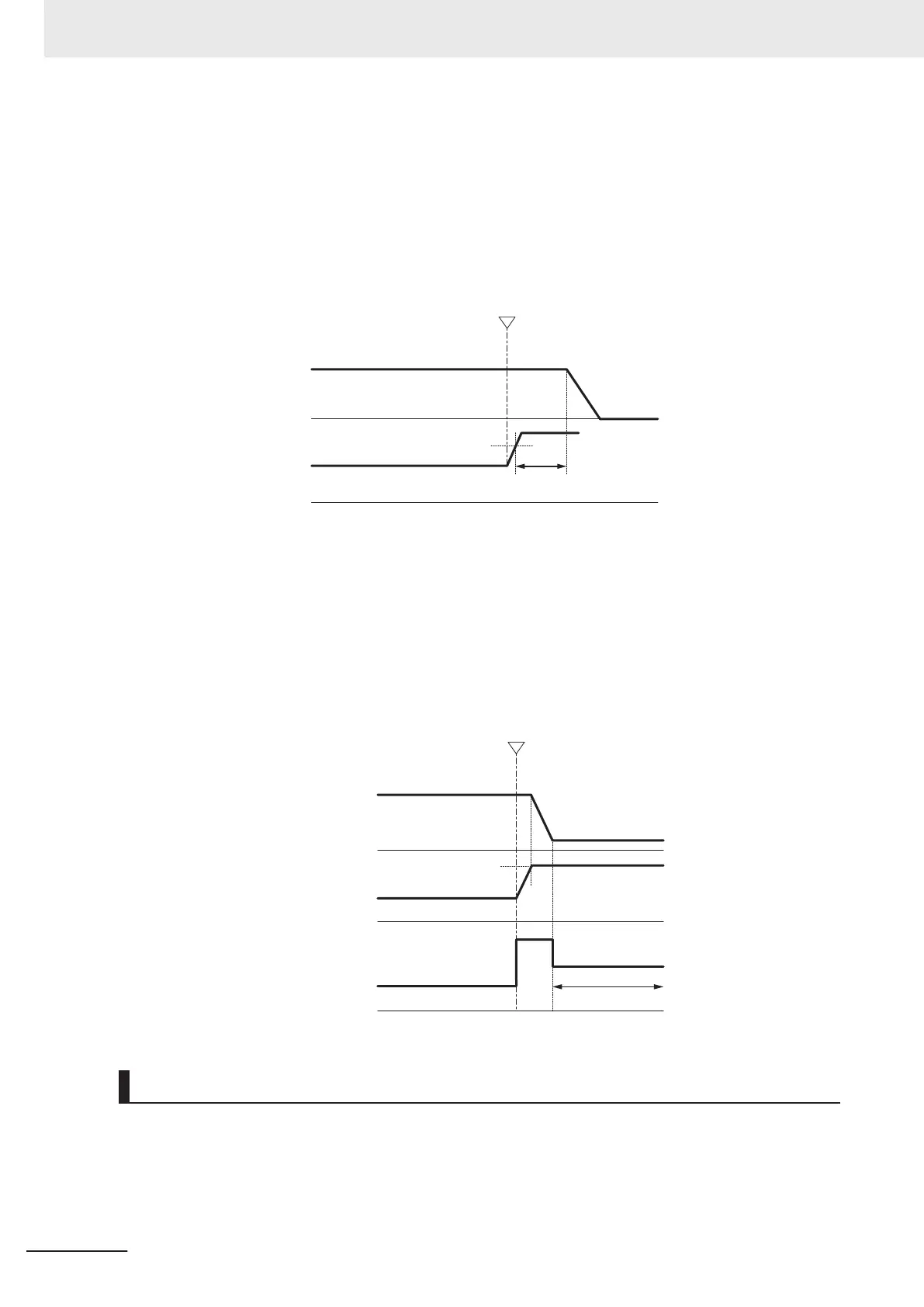
For operation selection (J65 = 1, 2)
If deceleration stop (J65 = 1) is set when output torque or output current has continued for the de-
tection timer (J67) or longer set with the Overload Stop Detection Level (J64), a deceleration stop
is performed at the selected deceleration time.
When free run stop (J65 = 2) is set, inverter immediately shuts down and the motor enters the free-
run state.
Deceleration stop or free-run stop
Collision with
the stopper
Motor speed
Output frequency
Current/Torque
Overload Stop Detection Level (J64)
Overload Stop Detection Timer (J67)
For operation selection (J65 = 3)
• PI control is started by the set values of Overload Stop Function P gain (P) (J90) and Overload
Stop Function Integral time (J91) when the Overload Stop Detection Level (J64) is reached. Tor-
que is controlled by PI control so that the Overload Stop Detection Level (J64) is maintained.
When the Frequency Lower Limit (F16/E118) is reached, control is switched to current control.
Overload Stop Item Selection (J63) is not related to this setting.
Current control
Collision with
the stopper
Motor speed
Output frequency
Torque limit
Overload Stop
Function Current level (J92)
Torque
Current
Overload Stop Detection Level (J64)
Proportional Gain (P), Integral Time (I) and Current Limitation Level
When “3: Torque limit operation (Deceleration)” function is selected for Overload Stop Mode Selection
(J65), the parameters described below can be set.
• Overload Stop Function P gain (J90)
7 Other Functions
7-154
M1 Series Standard Type User's Manual (I669)

 Loading...
Loading...








