4-7
4
Settings for the Control Methods
The usable Autotuning methods depend on the control method setting of the Inverter.
Overview of Settings
Make the required settings in quick programming mode and autotuning mode according to Fig 4.1.
Setting the Control Method
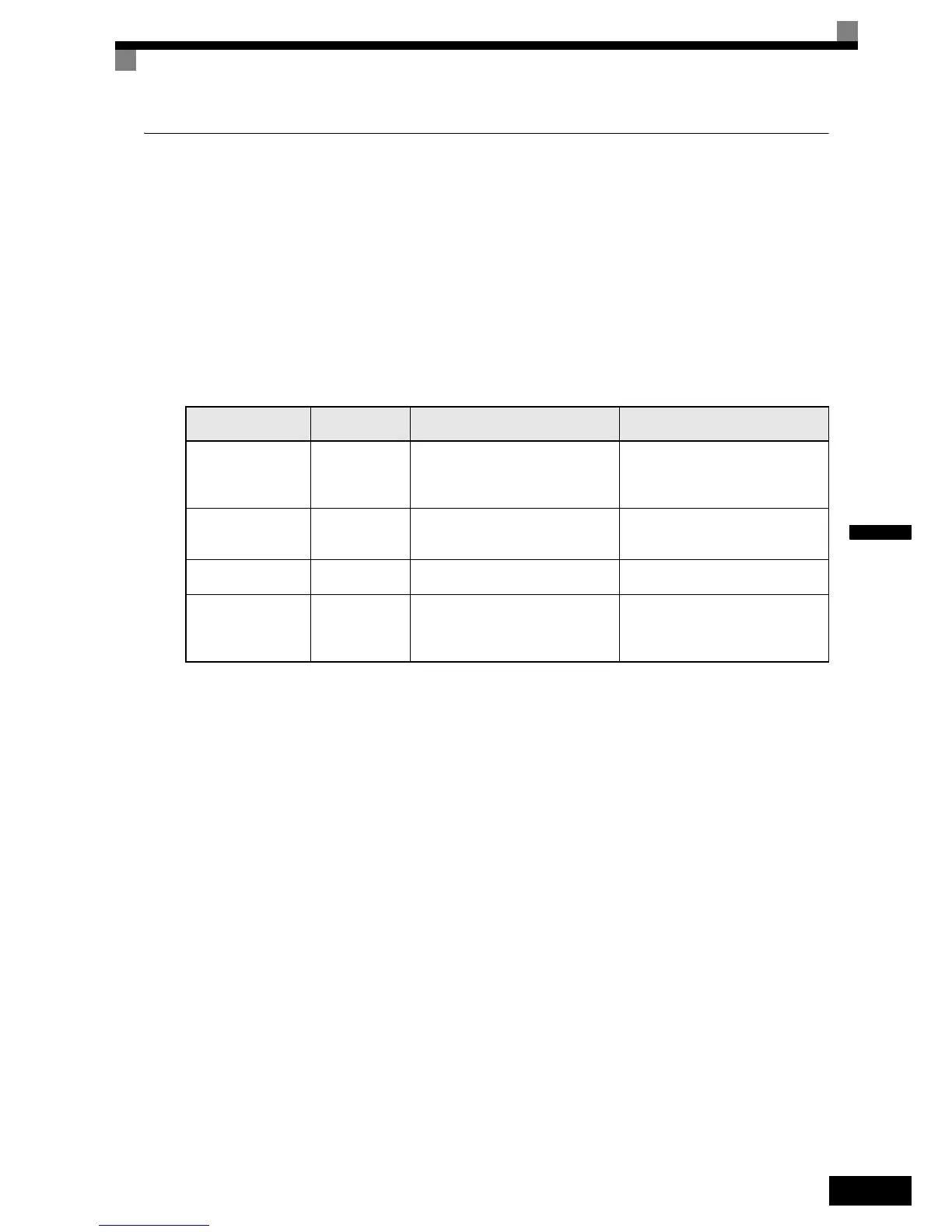
Select the appropriate control mode as required by the application. Table 4.2 shows the main properties of
each control mode.
Note With Open Loop or Closed Loop Vector control, the motor and Inverter must be connected 1:1. The motor capacity for which stable control is possible
is 50% to 100% of the Inverters capacity.
V/f Control without PG (A1-02 = 0)
• Set either one a fixed V/f pattern (E1-03=0 to E) or specify a user-set V/f pattern (E1-03=F) as required for
the motor and load characteristics using E1-04 to E1-13 in advanced programming mode.
• Perform non-rotating autotuning for the line-to-line resistance if the motor cable is 50 m or longer for the
actual installation or if a heavy load causes motor stalling. Refer to the following section on Autotuning for
details on non-rotating autotuning.
V/f Control with PG (A1-02=1)
Additionally to the V/f control without PG settings the following settings have to be made:
• Set the number of motor poles in E2-04 (Number of Motor Poles)
• Set the number of pulses per rotation in F1-01 (PG Constant). If there is a reduction gear between the
motor and PG, set the reduction ratio in F1-12 and F1-13 in advanced programming mode.
Table 4.2 Control Mode Properties
Control Mode
Parameter Set-
ting
Basic Control Main Applications
V/f control
A1-02 = 0
(factory setting)
Fixed voltage/frequency ratio control
Variable speed control, particularly
control of multiple motors with one
Inverter and replacing existing
inverters
V/f control with PG A1-02 = 1
Fixed voltage/frequency ratio control
with speed compensation using a PG
Applications requiring high-precision
speed control using a PG on the
machine side
Open Loop Vector
control
A1-02 = 2 Current vector control without a PG
Variable speed control, applications
requiring speed and torque accuracy.
Closed Loop Vector
control
A1-02 = 3 Closed Loop Vector control
Very high-performance control with a
PG (simple servo drives, high-preci-
sion speed control, torque control, and
torque limiting)
Simple operation of a general-purpose
motor at 50 Hz:
E1-03 = 0 or F (default)
If E1-03 = F, the default setting in the user setting from
E1-04 to E1-13 are for 00 Hz
Simple operation of a general-purpose
motor at 60 Hz:
E1-03 = 1

 Loading...
Loading...







