6-129
6
Zero-Servo Function
The Zero-Servo function holds the motor when the motor is stopped in a so called Zero-Servo status. This
means, that if the frequency reference falls below the Zero-Speed level (parameter b2-01) a position loop is
activated and the motor is kept at the position, even if a load is applied.
The zero-servo function must be enabled using a digital input, which is programmed for is set to Zero-Servo
command (H1- = 72).
The actual deviation of the rotor position from the zero position can be monitored using parameter U1-35. The
shown value must be divided by to the get the displacement in encoder pulses.
A digital output (H2- = 33) can be used to signalize the completion of a Zero-Servo command. The output
is closed as long as the actual rotor position is within the zero position E Zero-Servo completion width.
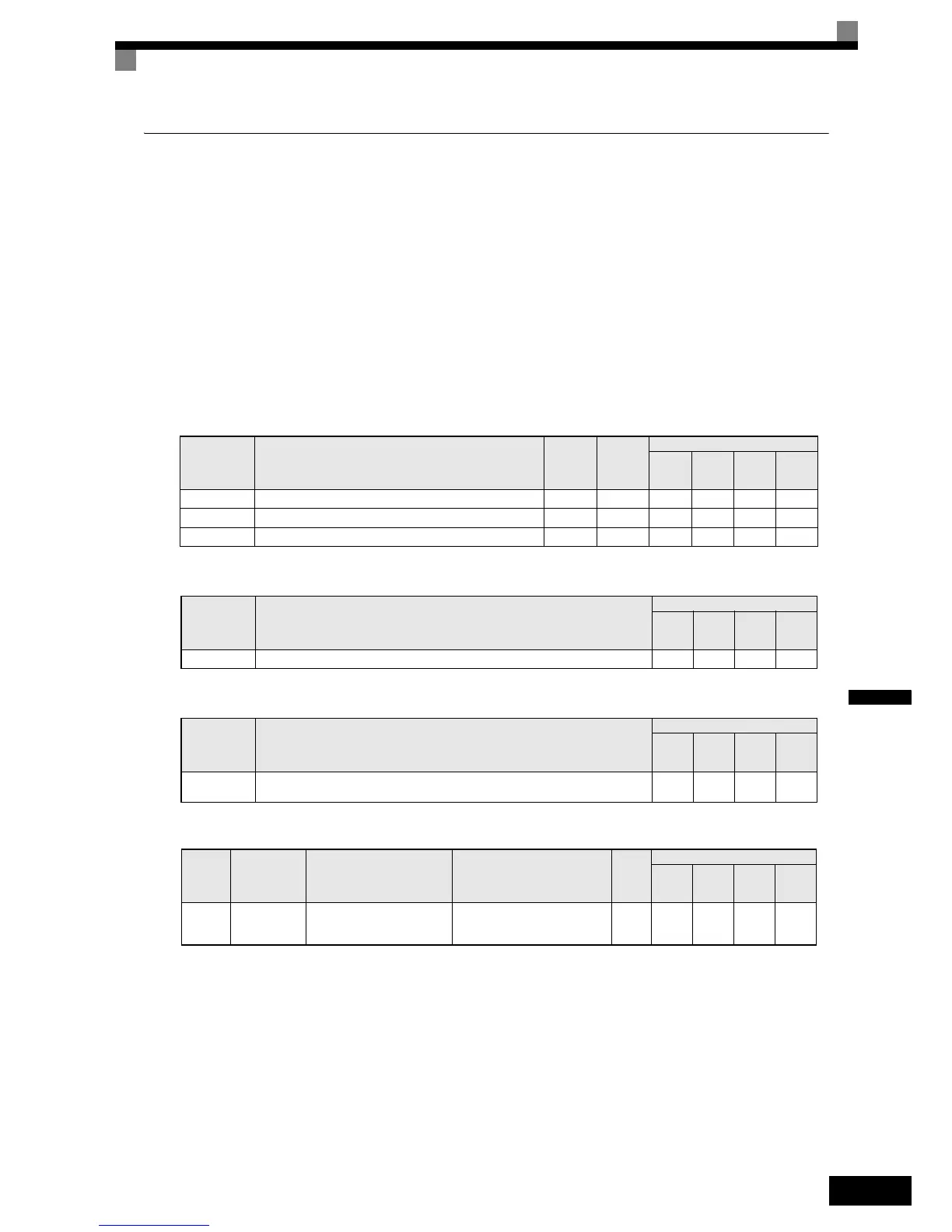
Related Parameters
Multi-function Digital Inputs (H1-01 to H1-05)
Multifunction Outputs (H2-01 to H2-03)
Monitors
Parameter
No.
Name
Factory
Setting
Change
during
Opera-
tion
Control Methods
V/f
V/f with
PG
Open
Loop
Vector
Closed
Loop
Vector
b2-01Zero speed level (DC injection braking starting frequency) 0.5 HzNo AAAA
b9-01 Zero-servo gain 5 No No No No A
b9-02 Zero-Servo completion width 10 No No No No A
Set Value Function
Control Methods
V/f
V/f
with
PG
Open
Loop
Vector
Closed
Loop
Vector
72 Zero-servo command (ON: Zero-servo) No No No Yes
Set Value Function
Control Methods
V/f
V/f
with
PG
Open
Loop
Vector
Closed
Loop
Vector
33
Zero-servo end
ON: Current position is within zero-servo start position ± the zero-servo end width.
No No No Yes
Parame-
ter
Number
Name Description
Output Signal Level at Analog
Output
Min.
Unit
Control Methods
V/f
V/f
with
PG
Open
Loop
Vector
Closed
Loop
Vector
U1-35
Zero-servo
movement
pulses
Shows the number of PG pulses
times 4 for the movement range
when stopped at zero.
(Cannot be output.) 1 No No No A

 Loading...
Loading...







