High-Speed Counter and Pulse Output
FPΣ User's Manual
118
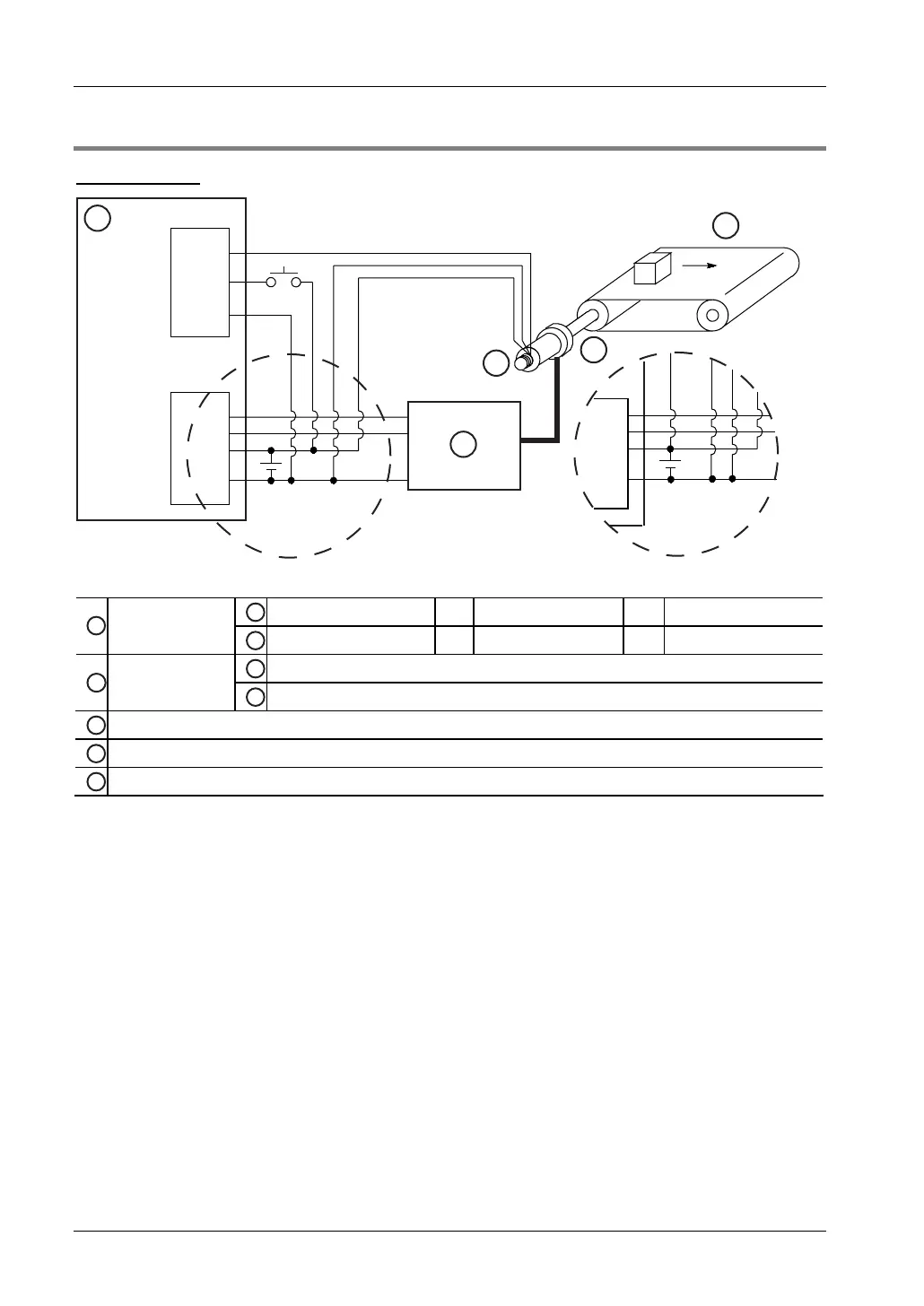
7.3.5.2 Positioning Operations with a Double-Speed Inverter
Wiring example
Y0
Y1
X0
X5
COM
COM
A
B
C
D
E
Y0
NPN
PNP
Y1
+
+
-
-
1
Input terminal X0 Encoder input X5 Operation start
A
PLC
2
Output terminal Y0 Inverter operation Y1 Inverter high-speed
3
Operation/stop
B
Inverter
4
Fast/slow
C
Encoder
D
Motor
E
Conveyor
When X5 turns to TRUE, Y0 and Y1 turn to TRUE and the conveyor begins to move. When
the elapsed value (sys_diHscChannel0ElapsedValue) reaches 4500, Y1 turns to FALSE and
the conveyor begins to decelerate. When the elapsed value reaches 5000, Y0 turns to FALSE
and the conveyor stops.