High-Speed Counter and Pulse Output
FPΣ User's Manual
134
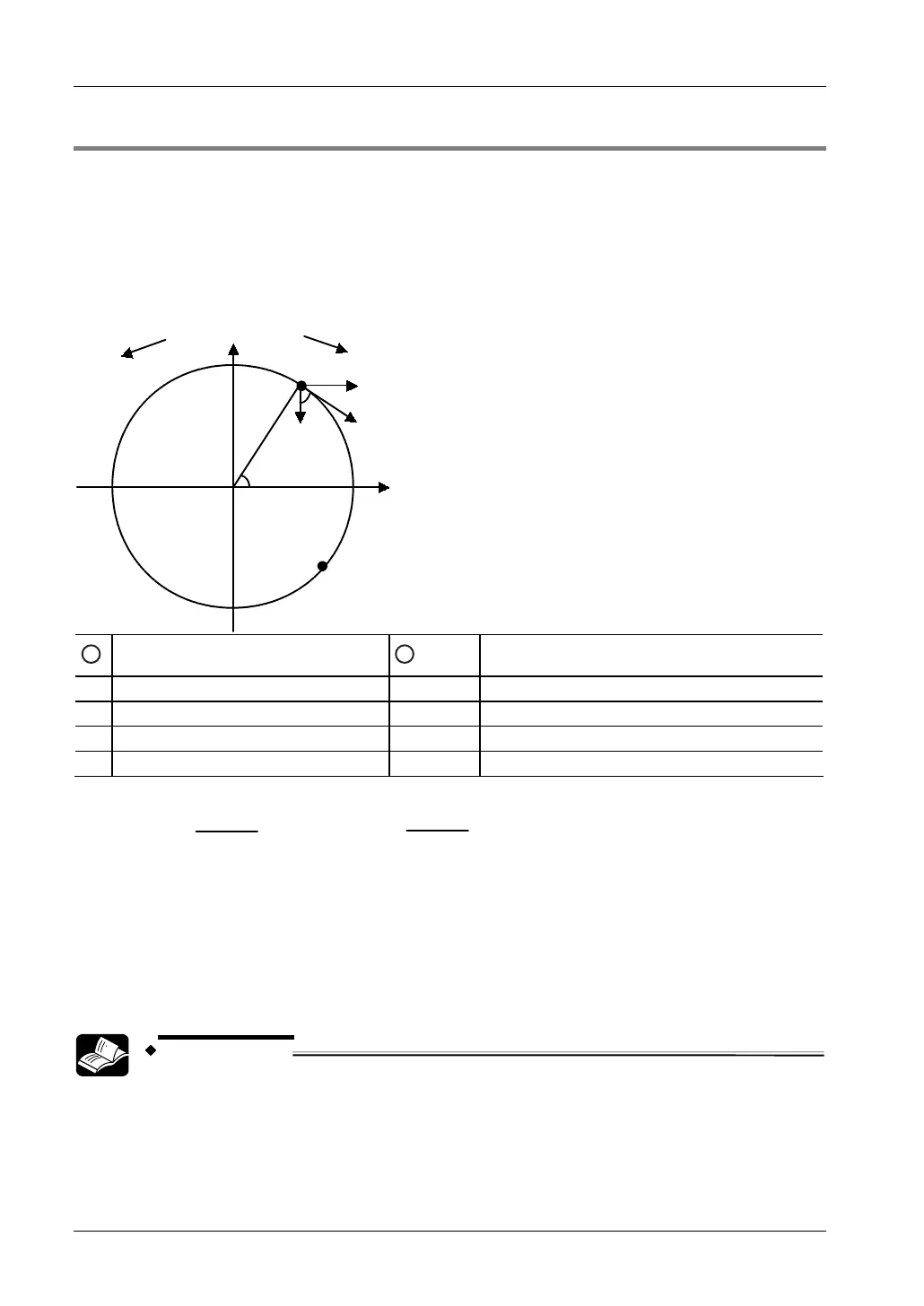
7.4.3.8 F176_PulseOutput_Center, Circular Interpolation (Center Position)
Pulses are output from two channels in accordance with the parameters in the specified DUT,
so that the path to the target position forms an arc. The radius of the circle is calculated by
specifying the center position and the end position. Pulses are output from the specified
channel when the control flag for this channel is FALSE and the execution condition is TRUE.
Pulse output characteristics
X
Fy
Fv
Fx
r
Y
S(Xs, Ys)
O (Xo, Yo)
E (Xe, Ye)
θ
θ
1
Rotation direction: Reverse (from
channel 0 to channel 2 CW axis)
2
Rotation direction: Forward (from channel 2 to
channel 0 CW axis)
F
v
:
Composite speed
O (Xo,Yo):
Center position
F
x
:
X-axis speed
S (Xs,Ys):
Current position (Start)
F
y
:
Y-axis speed
P (Xp,Yp)
Pass position
r:
Radius
E (Xe,Ye)
Target position (End)
|Ye-Yo|
r
|Xe-Xo|
r
Fx= Fvsin θ= Fv Fy= Fvcosθ =Fv
Example: Let channel 0 be the X-axis and channel 2 be the Y-axis. The position control mode
is absolute value control.
The current position is (θ=60°, Xs=5000, Ys=8660). The center position O (Xo=0, Yo=0) is
used as a reference point. Pulses are output from the X-axis (channel 0) and the Y-axis
(channel 2) at a speed of Fv=2000Hz until the target position (θ=-30°, Xe=8660, Ye=-5000) is
reached.
REFERENCE
Please refer to the FPWIN Pro online help for details and a programming
example.