4
Device structure
Communication interfaces
Manual – DHE/DHF/DHR21B (standard) and DHE/DHF/DHR41B (advanced)
14
The Ethernet1 (EtherCAT
®
/SBus
PLUS
) system bus interface is used to control drive in-
verters, I/O modules and other EtherCAT
®
slave components.
XM
X32X33
X36
X37
X35
X34
2
4
6
1
3
5
EtherCAT
SBus
PLUS
DH.41B
[2]
[6]
[1]
[3]
[6]
[7]
[4]
[5]
SBus (CAN 1) SBus (CAN 2)
®
9007201639414539
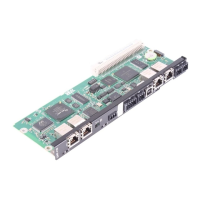
[1] X34: COM1/COM2 (RS485) engineering interfaces
[2] X35: USB engineering interface
[3] X36: Ethernet 1 (EtherCAT
®
/SBus
PLUS
) system bus interface
[4] X37: Ethernet 2 engineering interface
[5] X32/X33: CAN2/CAN1 system bus interfaces
[6] Inverter with CAN1/CAN2 system bus interfaces
[7] Inverter with Ethernet 1 system bus interface
22900055/EN – 08/2016

 Loading...
Loading...