3 Functions Issue 10/06
MICROMASTER 440 Operating Instructions
176 6SE6400-5AW00-0BP0
Example: Permanent PID controller should fulfill the following
secondary conditions:
PID controller enable and PID setpoint input via PID fixed
frequencies and PID actual value via the analog input
Parameterization:
a) Permanent PID controller enable: P2200 = 1.0
b) Setpoint input via PID-FF: P2253 = 2224
c) Actual value input via analog input ADC: P2264 = 755
d) Setpoint input via PID: P2251 = 0
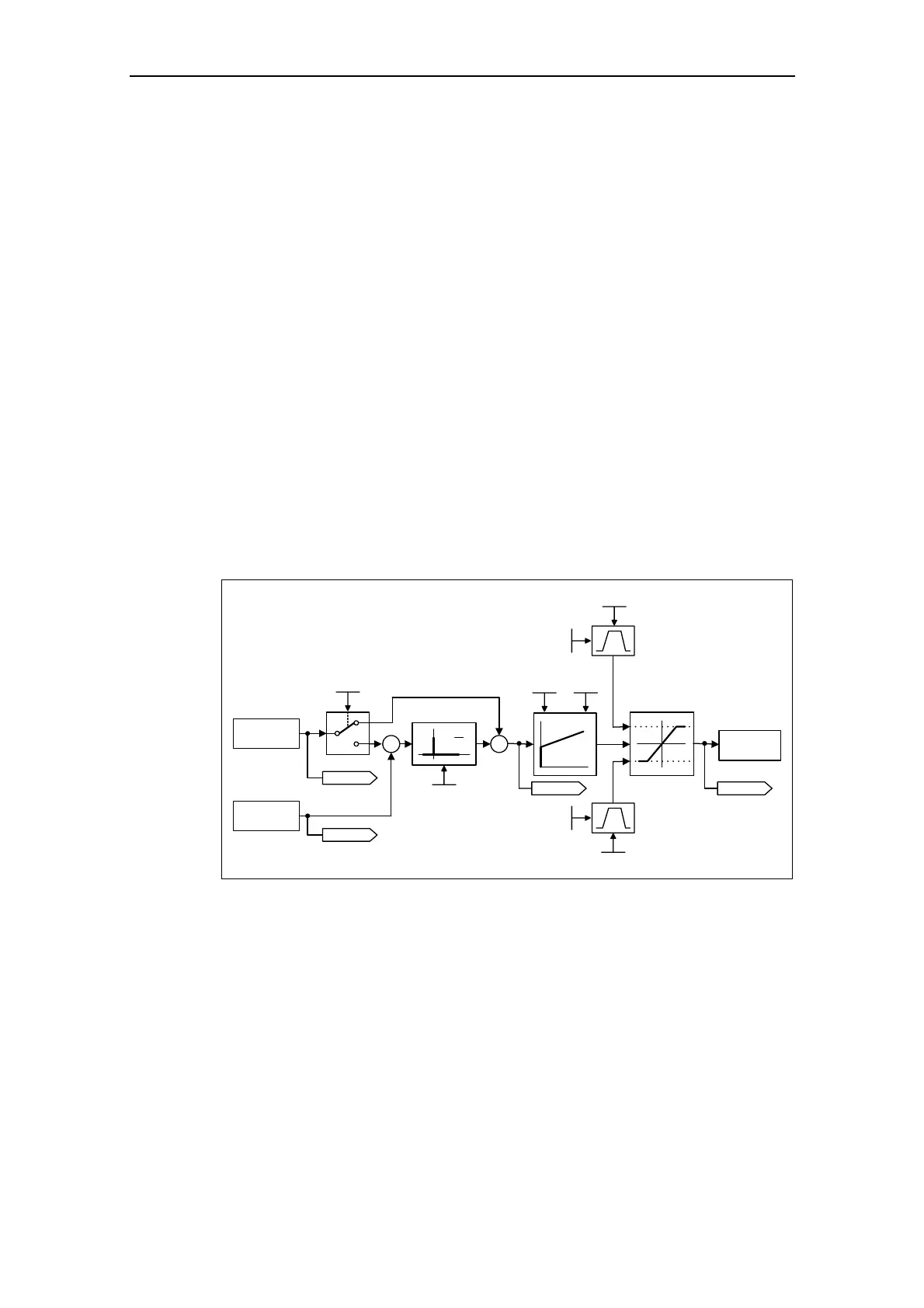
The supplementary (additional) setpoint is added to the main setpoint (PID-SUM)
and the sum is fed to the setpoint filter (PID-PT1) at the setpoint-actual value
summation point via the PID ramp-function generator (PID-RFG). The source of the
supplementary setpoint (BICO parameter P2254), the ramp-up / ramp-down times
of the PID ramp-function generator (P2257, P2258) as well as also the filter time
(P2261) can be adapted to the particular application by appropriately
parameterizing the corresponding parameters.
Similar to the PID setpoint branch, the actual value branch of the technological
controller has a filter (PID-PT1) which can be set using parameter P2265. In
addition to the smoothing, the actual value can be modified using a scaling unit
(PID-SCL).
The technological controller can be parameterized as either P, I, PI or PID
controller using parameters P2280, P2285 or P2274.
+
-
d
dt
+
+
0
1
PID
setpoint
P2274
P2263
PID
feedback
r2262
r2272
Kp Tn
P2285P2280
r2273
Motor
control
x
y
P2291
P2293
P2293
P2292
r2294
Fig. 3-55 PID controller
For specific applications, the PID output quantity can be limited to defined values.
This can be achieved using the fixed limits - P2291 and P2292. In order to prevent
the PID controller output exercising large steps at power-on, these PID output limits
are ramped-up with ramp time P2293 from 0 to the corresponding value P2291
(upper limit for the PID output) and P2292 (lower limit for the PID output). As soon
as these limits have been reached, the dynamic response of the PID controller is
no longer limited by this ramp-up/ramp-down time (P2293).

 Loading...
Loading...










