Closed-loop thyristor current control
System- and communication configuring D7-SYS - SIMADYN D 5-79
Edition 06.2002
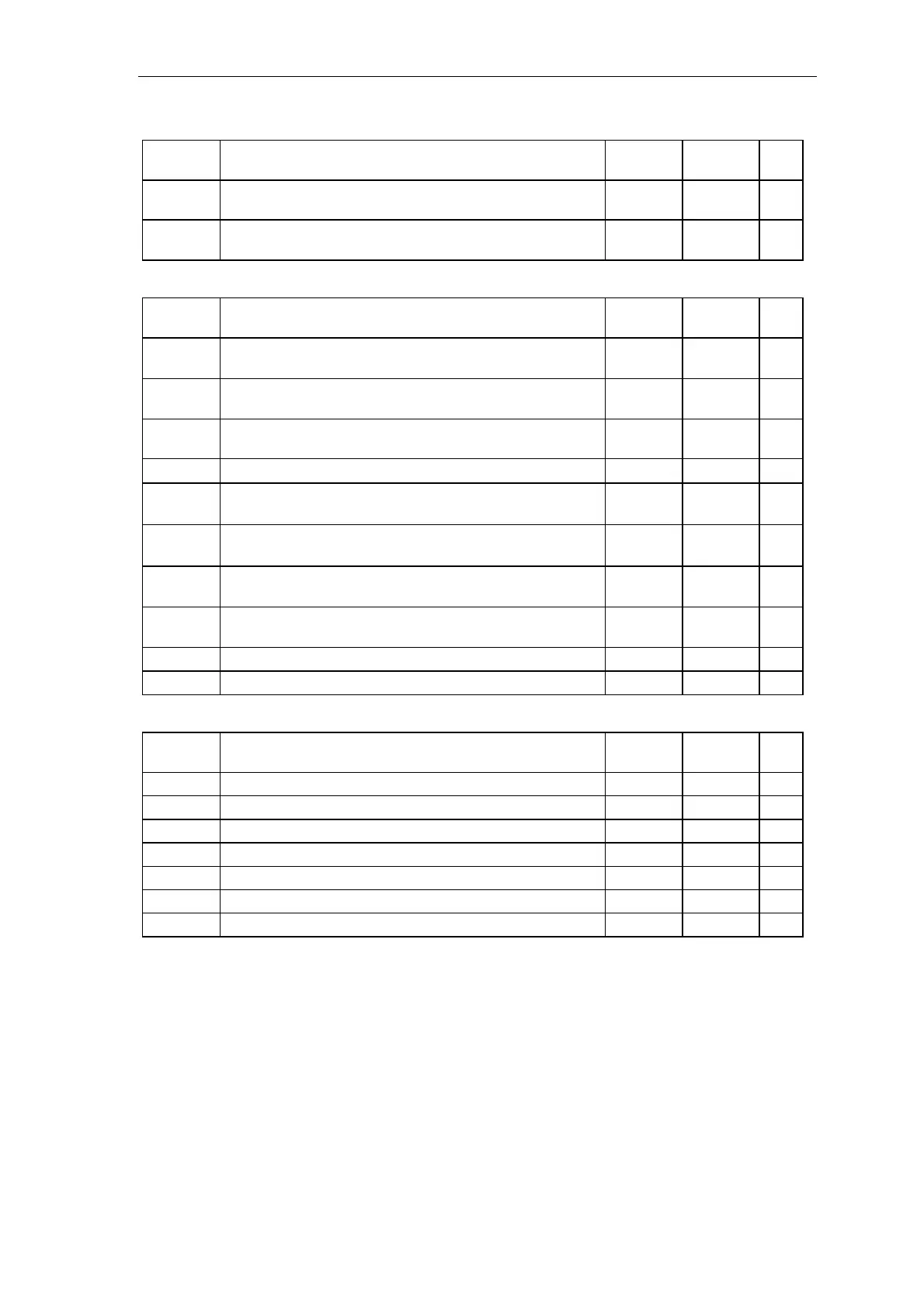
Connec-
tion
Significance Value Value
change
Type
CPC.VCI
Current setpoint at the discontinuous limit {0 < VCI <
discontinuous limit}
0.1
CPC.ALP
Pre-control angle in the discontinuous range [°],
{
≥25°…30°≤}
25.0
Connec-
tion
Significance Value Value
change
Type
CAV.RRC
Rated DC current of the SITOR set [A]
Condition: RRC
≥ ARC , > QSF\bit 12 = 1
0.0
Init
CAV.ARC
Rated system / motor current [A]
Condition: RRC
≥ ARC ≠ 0 , > QSF\bit 12 = 1
0.0 Init
CAV.NF
Normalization of the current actual value at YC
Condition: NF > 0 ,
1.0 Init
CAV.XFO
Offset calibration [kHz] {≥-6.0…+6.0≤}
0.0 Init
CAV.XF2
Current-dependent inverter stability limit [1] {≥0.0…0.2≤}
Condition: 0.0
≤ XF2 ≤ 0.2, > QSF\bit 12 = 1
0.0 Init
CAV.IAV
Correction for the inverter stability limit [1] {≥0.7…1.3≤}
Condition: 0.7
≤ IAV ≤ 1.3, > QSF\bit 12 = 1
1.0 Init
CAV.AL1
Positive correction, current actual value sensing
Condition: -0.1
≤ AL1 ≤ 0.1,
0.0 Init
CAV.AL2
Negative correction, current actual value sensing
Condition: -0.1
≤ AL2 ≤ 0.1,
0.0 Init
CAV.CX1 Max. current for torque direction M1 (abs. value) 0.1
CAV.CX2
Max. current for torque direction M2 (abs. value) 0.1
Connec-
tion
Significance Value
Value
change
Type
CPI.CLU Limit of the current-dependent inverter stability limit [°]
150.0
CPI.ALU Inverter control limit, firing angle [°]
150.0 Init
CPI.ALL Rectifier control limit, firing angle [°]
30.0 Init
CPI.SVC
Mode: Pre-control of the CPI 0
CPI.KP
Proportional gain [1] 0.01
CPI.TN
Integral action time [ms] 10000 ms
CPI.PC
Inhibit integrator component 0