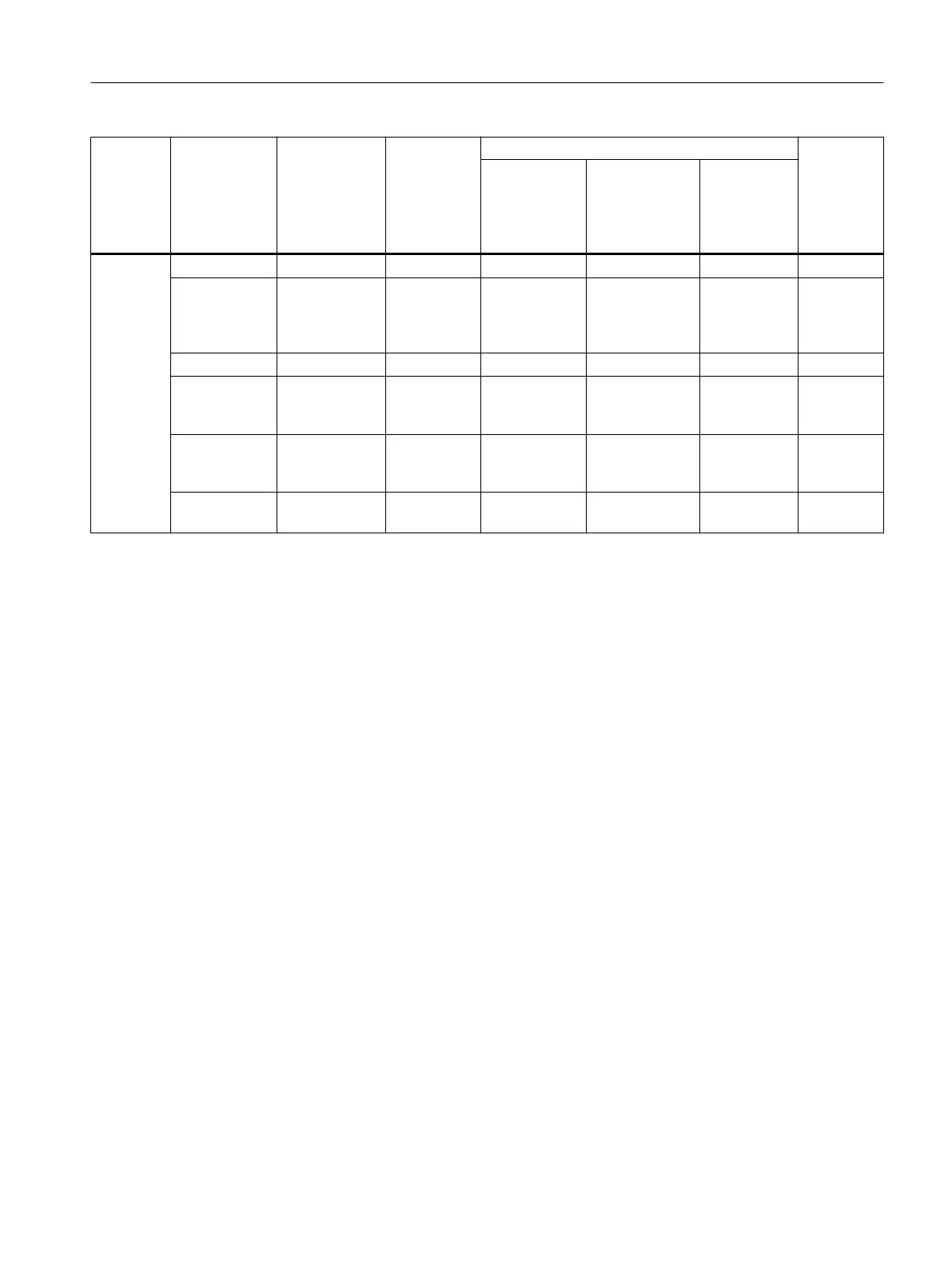
Replaced
component
Control type Drive re‐
sponse
(fault)
User action Diagnostic
parameters
Fault acknowl‐
edgment re‐
quired
1)
Acknowledg‐
ment is re‐
quired that the
component has
been replaced
2)
Save
3)
Extended
Functions
Control Unit All F01641.0 = 1 Yes No Yes r9776.2 = 1
Motor Module PROFIsafe,
OnBoard F‑DI,
without selec‐
tion
F01641.1 = 1 Yes No Yes r9776.2 = 1
Power Module All F01641.2 = 1 Yes No Yes r9776.2 = 1
Sensor
Module
(CPU 1)
All F01641.3 = 1 Yes No Yes r9776.2 = 1
Sensor
Module
(CPU 2)
All F01640.4 = 1 Yes Yes Yes r9776.2 = 1
r9776.3 = 1
Encoder
4)
All F01641.5 = 1
F01641.6 = 1
Yes No Yes r9776.2 = 1
1)
The fault must be acknowledged each time a component is replaced using a standard acknowledgment (e.g. using a 0/1
signal at p2103). However, even without acknowledgment the drive can still be operated.
2)
The replacement of the components listed in the table must be acknowledged in order to ensure the new internal device
communications to be established. When replacing other components, acknowledgment is not required, as the new
communications to be established are automatically ensured.
To acknowledge a component replacement, perform the following sequence on all of the drive objects involved:
- Check whether the following preconditions are fulfilled:
- p0010 = 0
- It is not permissible for a firmware update to be active on the drive object.
- Set p9702 = 29 (= 1D hex)
3)
The modified data must be saved after a component has been replaced:
- It is not permissible for a firmware update to be active on the drive object.
- Copy from RAM to ROM.
If the data is not saved, the fault is output again after the next POWER ON.
4)
Only for encoders with serial number (e.g. EnDat)
Replacing motors for safety without encoder
When using safety functions without encoder, the motor pole pair number plays a decisive role.
If a motor is replaced, then the behavior depends on the pole pair number: If a motor with a
higher pole pair number is used (other than that configured), the mechanical speed is less than
that calculated by Safety Integrated. If a motor with a lower pole pair number is used (e.g. when
a motor is replaced), the mechanical speed is higher than that calculated by Safety Integrated.
● After a replacement such as this, perform a test by comparing the safe actual speed (r9714)
with the normal speed (r0063 or the output frequency), and if required, correct the
configured pole pair number.
Component replacement (software/hardware)
9.3 Motors, CU SINAMICS S120
Safety Integrated (with SINAMICS S120)
Commissioning Manual, 02/2020, A5E46305916B AB 347