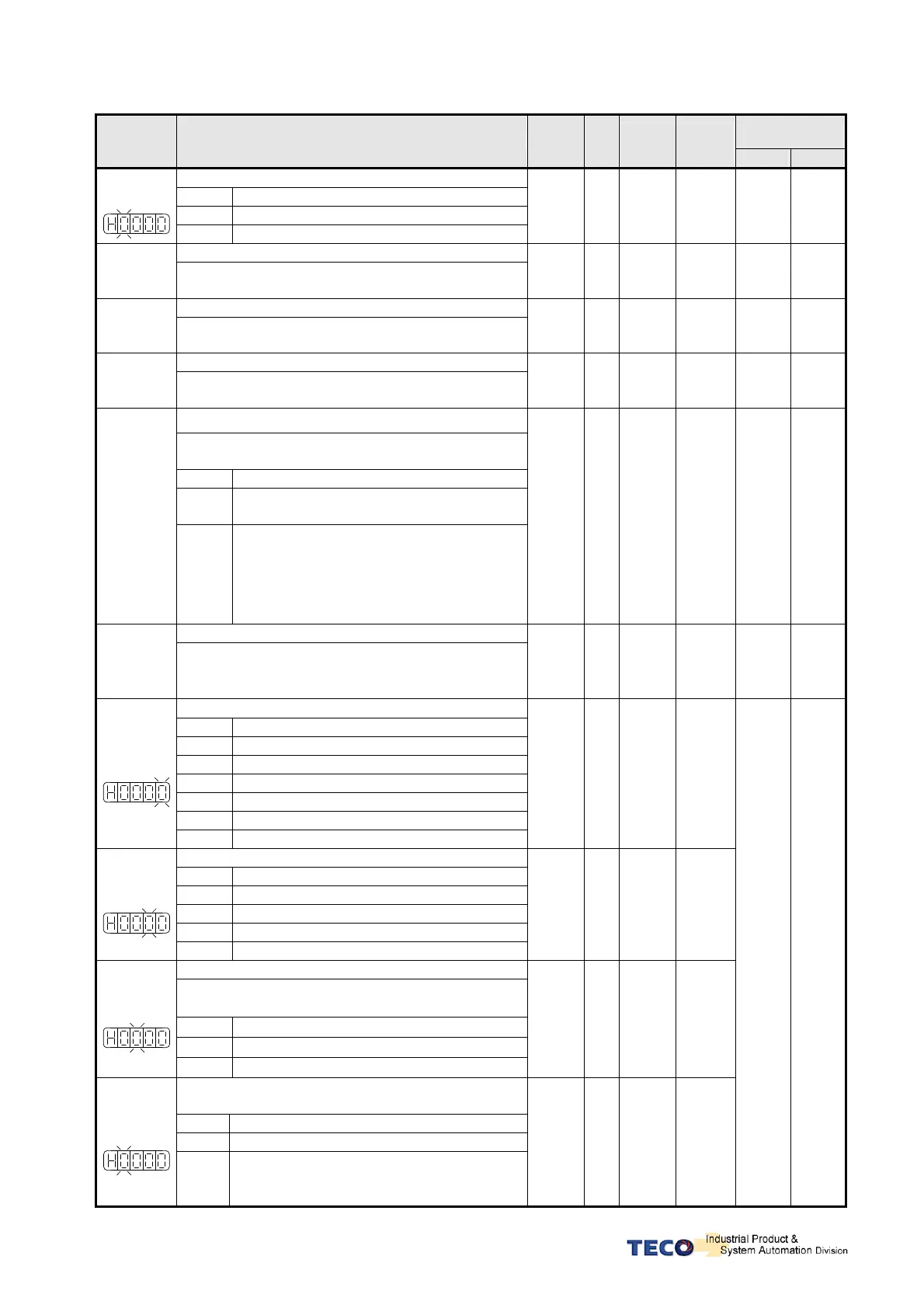
6-8
Communication
Address
Parameter Name & Function Default Unit
Setting
Range
Control
Mode
RS232 RS485
Motor series selection
Setting Explanation
0 The existing motor
●
Cn031.3
1 01 motor(only for mainland China)
0 X
0
│
1
ALL 50EH 001FH
Speed feedback smoothing filter
Cn032
Restrain sharp vibration noise by the setting and
this filter also delay the time of servo response.
500 Hz
0
│
2500
Pe
Pi
S
546H 0020H
Speed Feed-forward smoothing filter
Cn033
Smooth the speed feed-forward command.
500 Hz
0
│
1000
Pe
Pi
51EH 0021H
Torque command smoothing filter
Cn034
Restrain sharp vibration noise by the setting and
this filter delay the time of servo response.
500 Hz
0
│
5000
ALL C17H 0022H
Panel display content selection
Select display content for LED panel for power on
status.
Setting Explanation
0
Display data set and drive status
parameter. Refer 3-1
Cn035
1
│
31
Display Un-01 ~ Un-31 content. Refer to
page 6-40 to 6-41 for more information.
Ex:Set Cn035=1, when power on it display
the actual speed of motor. (content of
Un-01)
0 X
0
│
31
ALL 541H 0023H
Servo ID number
★
Cn036
When using Modbus for communication,each
servo units has to setting a ID number. repeated ID
number will lead to communication fail.
1 X
0
│
254
ALL 51BH 0024H
Modbus RS-485 braud rate setting
Setting Explanation
0 4800
1 9600
2 19200
3 38400
4 57600
★
Cn037.0
5 115200
1 bps
0
│
5
ALL
PC Software RS-232 braud rate setting
Setting Explanation
0 4800
1 9600
2 19200
★
Cn037.1
3 38400
1 bps
0
│
3
ALL
Communication RS-485 selection
This parameter can be set to RS-485
communication written to the EEPROM or SRAM.
Setting Explanation
0 Write to EEPROM
★
Cn037.2
1 Write to SRAM
0 X
0
│
1
ALL
Communication RS232 is read and written to
the selection of EPROM.
Setting Explanation
0 JSDEP Command address (E8~EC)
★
Cn037.3
1
JSDEP Command address (70~74)
* While setting to 1, Pn407~Pn410 are
prohibited from applying.
0 X
0
│
1
ALL
544H 0025H
 Loading...
Loading...

