6-11
Torque-Control Parameter
Communication
Address
Parameter Name & Function Default Unit
Setting
Range
Control
Mode
RS232 RS485
Linear acceleration/deceleration method
Setting Explanation
0 Disabled.
1 Enabled.
★
Tn101
2
Enable Torque command smooth
accel/decel time Constant.
0 X
0
│
2
T
C8CH 0101H
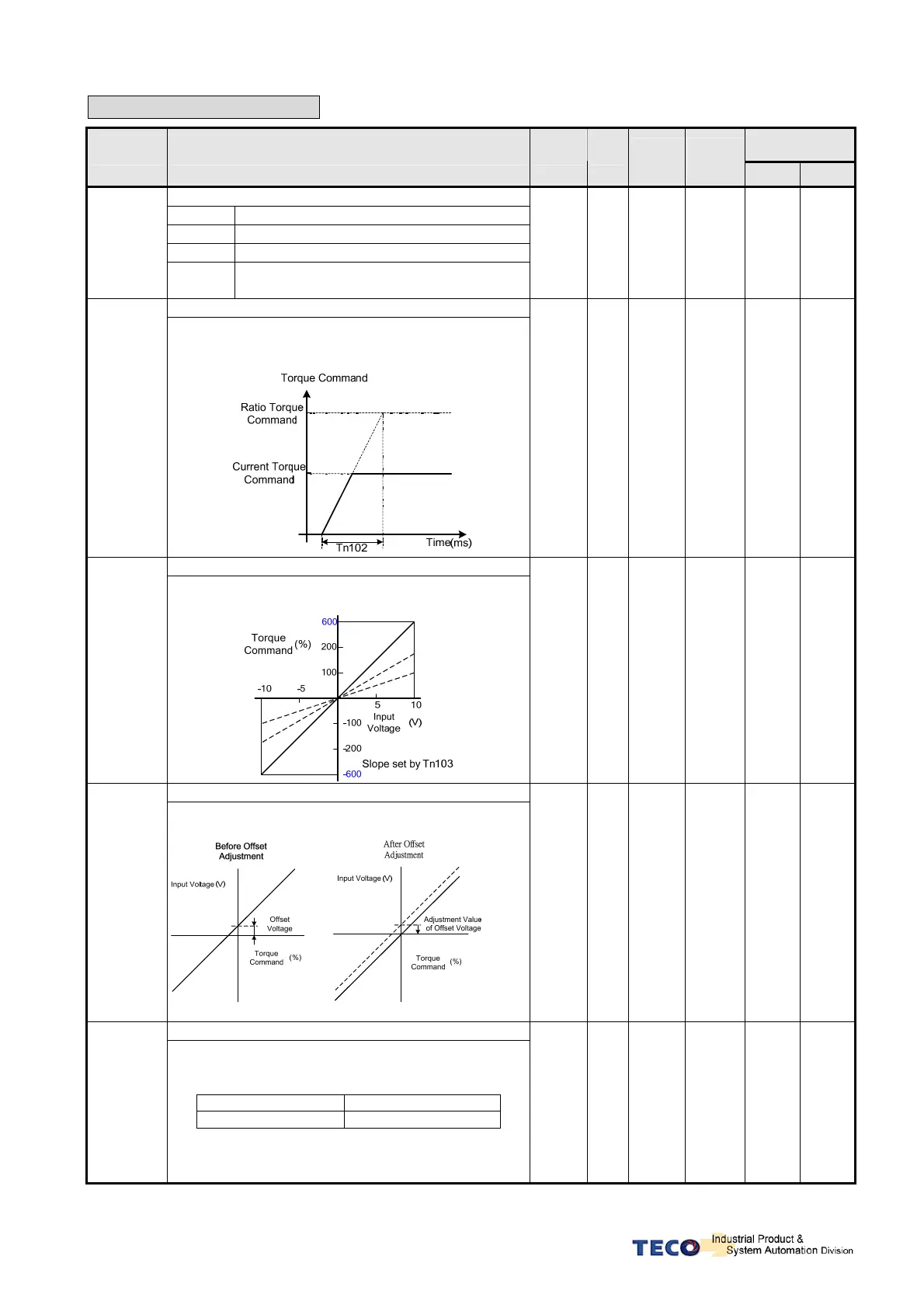
Linear accel/decel time period.
★
Tn102
Time taken for the torque-command to linearly
accelerate to the rated torque level or Decelerate to
zero torque .
1 msec
1
│
50000
T 523H 0102H
Analog Torque Command Ratio
Tn103
Slope of voltage command / Torque command can
be adjusted.
300
%
10V
0
│
600
T 521H 0103H
Torque Command, analog input voltage offset
Tn104
The offset amount can be adjusted by this
parameter.
0 mV
-10000
│
10000
T 522H 0104H
Preset Speed Limit 1. ( Torque control mode)
Tn105
In Torque control, input contacts SPD1 and SPD2
can be used to select Preset speed limit 1. As
follows:
Input Contact SPD2 Input Contact SPD1
0 1
Note: Input contacts status “1” (ON) and “0” (OFF).
Refer to 5-6-1 to set high or low input logic levels.
100 rpm
0
│
3000
T 526H 0105H
 Loading...
Loading...

