C
LEAR
P
ATH
U
SER
M
ANUAL
R
EV
.
1.97
25
conveyor or rotary tool has reached operating speed. Note: this signal is
) during periods of acceleration and deceleration.
d torque.
de-asserted (open circuit
All Systems Go-Torque
In ASG-Torque mode, the HLFB output asserts (conducts) when the
ClearPath is enabled and the motor shaft is within a tolerance band of the
user-specifie
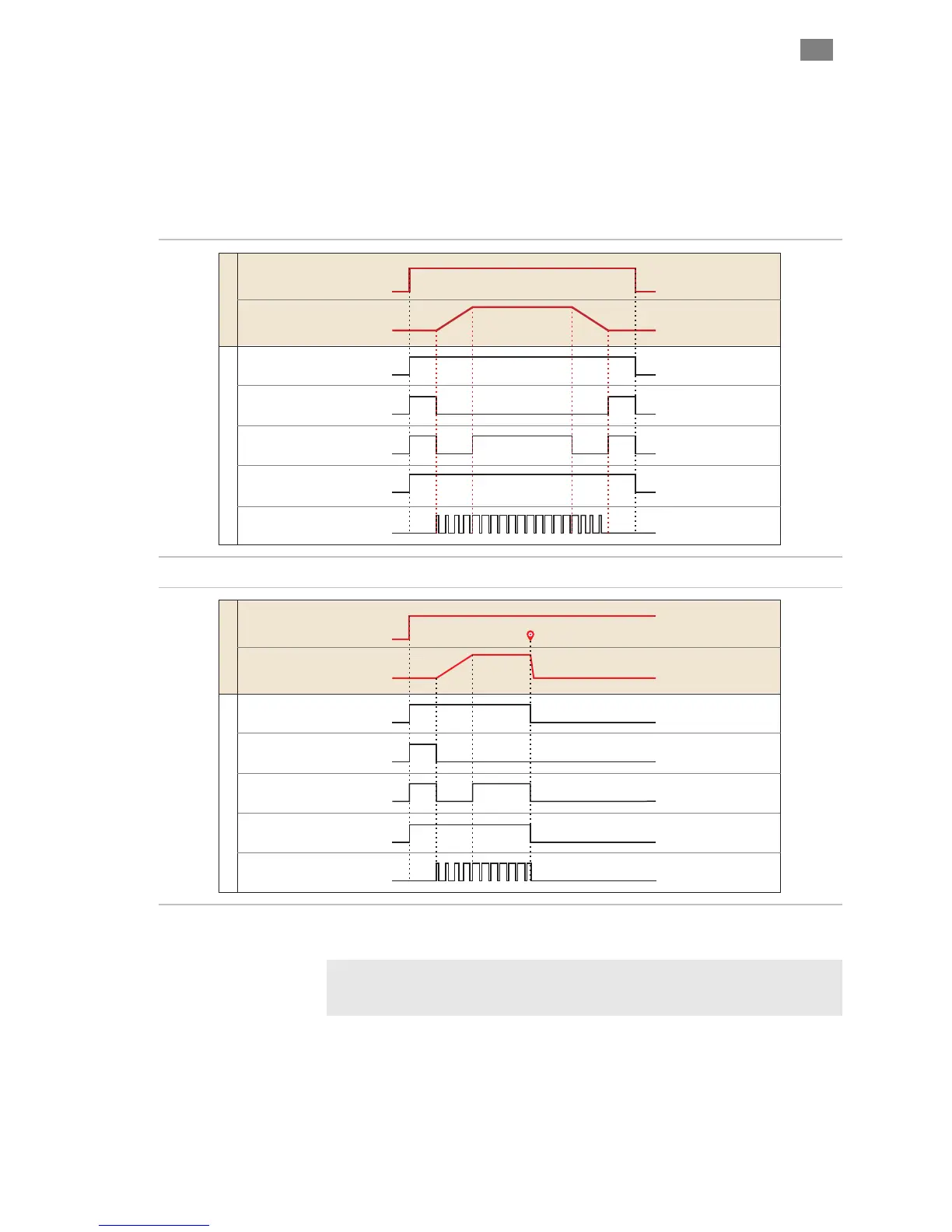
Enable Input Signal
Motor Velocity
(Velocity vs. Time)
Servo On
All Systems Go-Position
All Systems Go-Velocity
Speed Output
(Proportional PWM)
Asserts when motor reaches the
commanded velocity.
Asserts when motor is settled
per user (MoveDone) specification.
Asserts when motor is enabled
and not in a shutdown state.
Outputs a 50Hz PWM signal
proportional to motor speed.
constant velocity
accel decel
0
1
0
1
0
1
All Systems Go-Torque
Asserts when motor reaches the
commanded torque.
0
1
0
1
0
1
HLFB Response by Mode
Example Move
High-Level Feedback output signal during a typical move cycle (representative)
Enable Input Signal
Motor Velocity
(Velocity vs. Time)
Servo On
All Systems Go-Position
All Systems Go-Torque
All Systems Go-Velocity
Speed Output
(Proportional PWM)
0
1
0
1
0
1
0
1
0
1
0
1
HLFB Response by Mode
Example Move
Shutdown Event
High-Level Feedback output signal before and after a shutdown event (representative)
Note: Not all HLFB modes are supported in all ClearPath operational
modes. Refer to the ClearPath operational mode for supported HLFB
options.
T
EKNIC
,
I
NC
.
F
AX
(585)784-7460
V
OICE
(585)784-7454