C
LEAR
P
ATH
U
SER
M
ANUAL
R
EV
.
1.97
43
M
ODE
C
ONTROLS
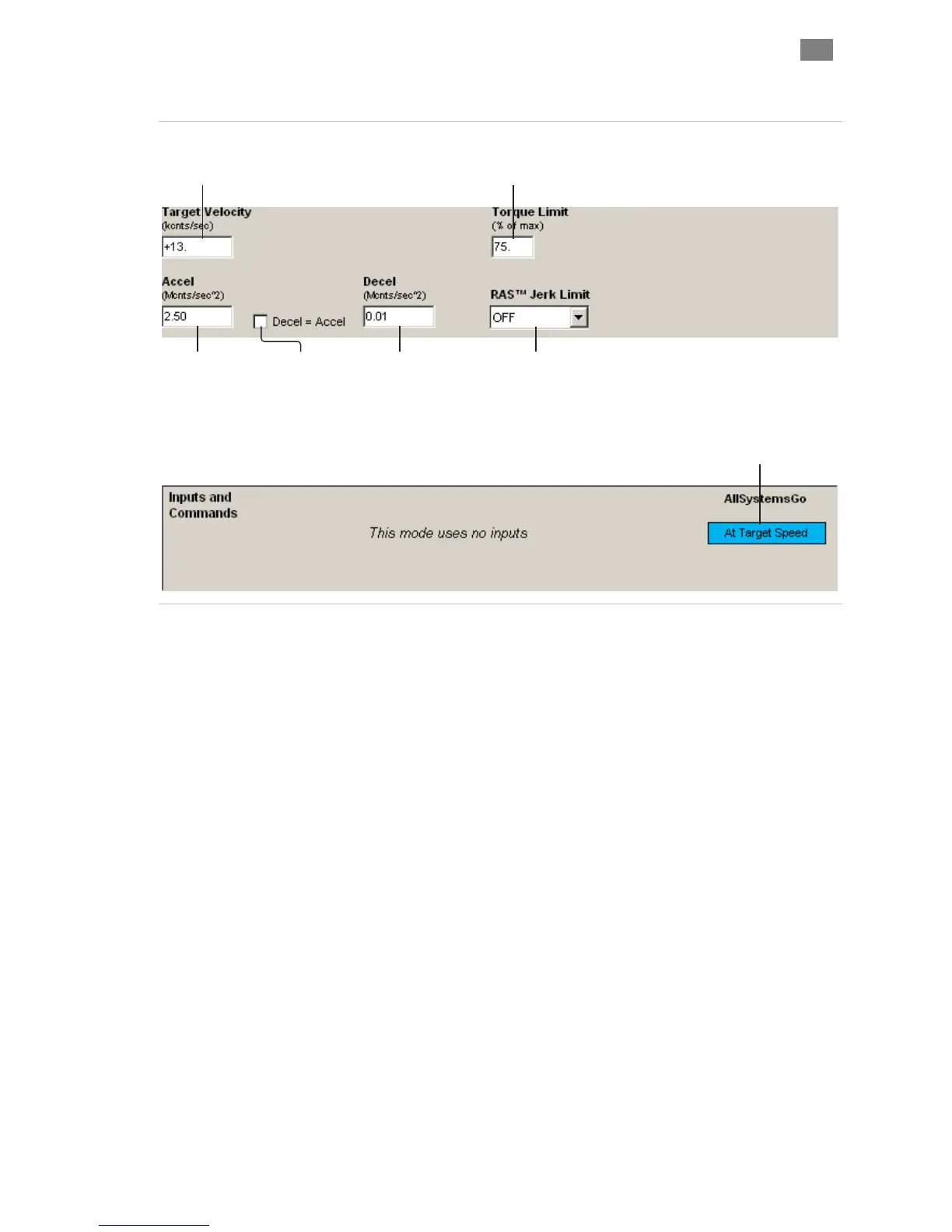
Enter maximum
desired motor
acceleration rate.
Enter target velocity.
Check here to set
motor deceleration
rate to same value
as acceleration rate.
Enter maximum
desired motor
deceleration rate.
Displays output status.
HLFB modes supported:
> Servo On
> AllSystemsGo
> Speed Output
Enter value (1-100) to limit
peak torque capability of
motor as a % of motor’s
maximum peak torque.
Set jerk limit. Higher values result in
smoother, more gradual transitions
between move segments of differing
acceleration; however, overall move
time is increased.
T
EKNIC
,
I
NC
.
F
AX
(585)784-7460
V
OICE
(585)784-7454