42
Operation SeaBat Sonar UI - User Manual
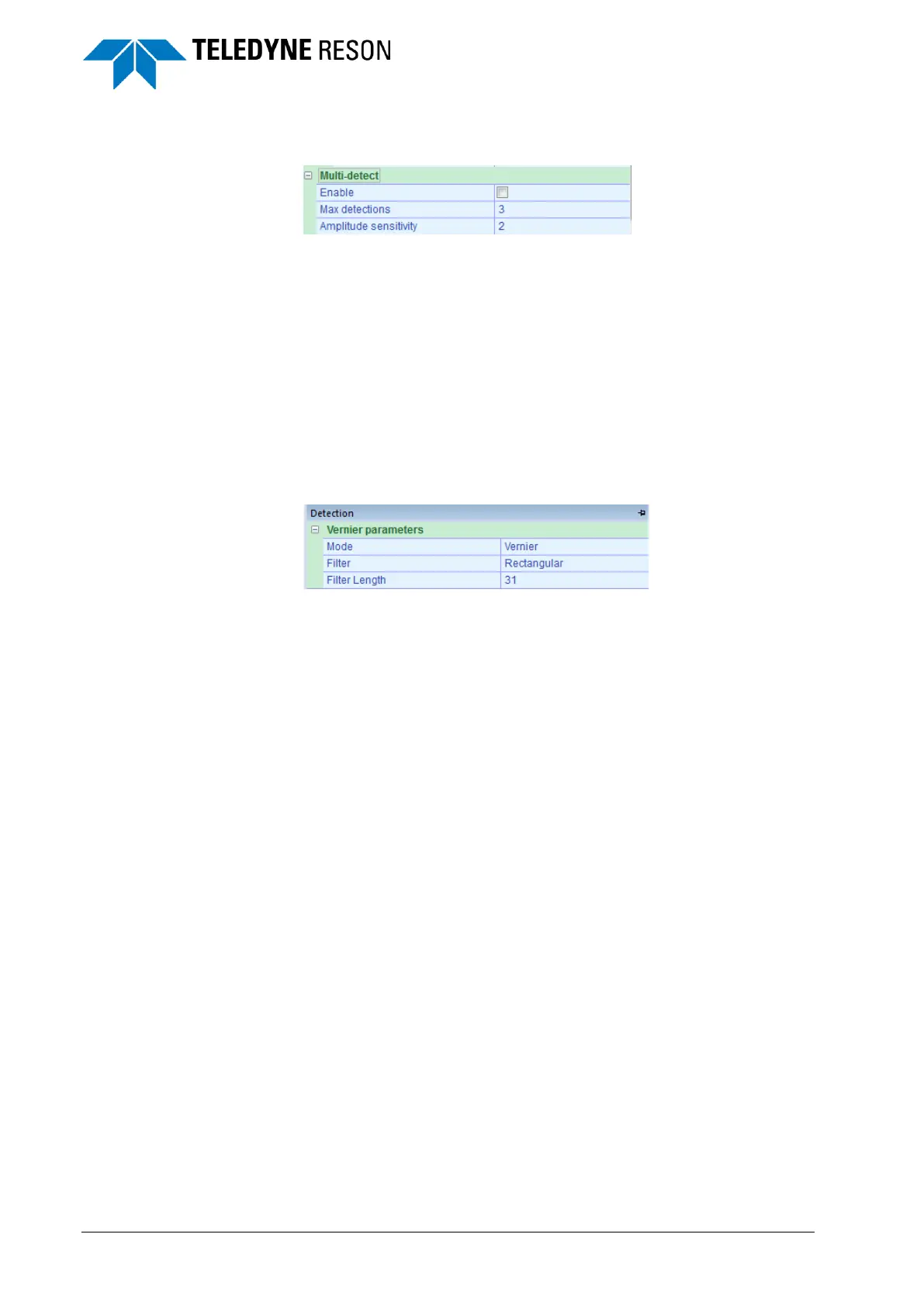
4.6.6 Multi-detect
Figure 4-46 Multi-detect
The Multi-detect is an algorithm for real time detection of objects in the
water column as well as the seafloor beneath.
More details from complex targets and improved data in a multipath
environment (like a quay wall) could be achieved.
For this algorithm three parameters are defined:
Max detections per beam. (minimum 1 – maximum 5)
Amplitude sensitivity. When increasing this value causes more
objects be detected.
4.6.7 Vernier Parameters
Figure 4-47 Vernier parameters
Vernier parameters are only available from the detection pane when a
multi-ping forward looking sonar system (e.g. 7130) is used.
Three parameters are set:
Mode:
-Vernier
-Triple array Mag & Phase
The mode settings allow the operator to switch between forward-
looking bathymetry (normal mode) and imagery when operating
the 7130 at 200kHz. The imagery mode can be useful for object
analysis based on acoustic shadow for example.
Filter:
-None
-Rectangular
-Hamming
The filter settings lets the operator choose whether a FIR (Finite
Impulse Response) low-pass filter is applied to the raw signal
prior to elevation computation by Vernier processing. For
bathymetry, a typical setting would be a rectangular filter of 19
taps. The longer the filter the smoother the output. For target
detection, a short filter or no filter is the preferred setting. The
Hanning filter favors the samples close to the center of the filter
window. For a given length it will have less effect than a
rectangular filter.
Filter length
The filter length from 1 (no filter) to 63 (longest filter that can be