7.3 I/O Contactor Unit
7-16
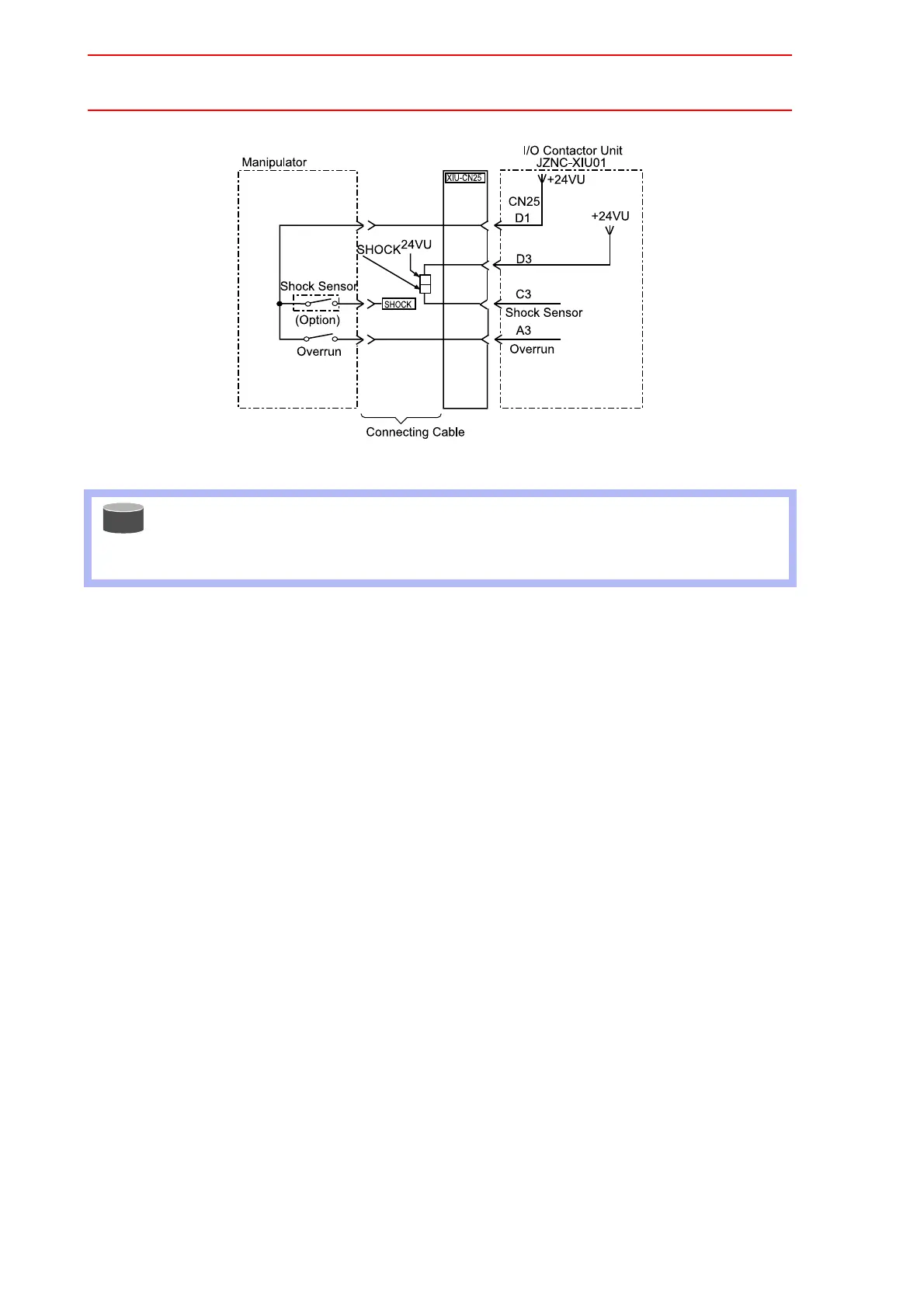
Shock Sensor Connection
"
Connection of External Power Supply for I/O
At factory setting, the internal power supply for I/O is used. If the external power supply for I/O
is used, connect it with following procedure.
1. Remove the wire connected between CN26-7 to -9 and CN26-8 to -10 of the I/O con-
tactor unit: JZNC-XIU01.
2. Connect +24V of the external power supply to CN26-7 and 0V to CN26-8 of the I/O
contactor unit: JZNC-XIU01.
When the shock sensor input signal is used, the stopping method of the robot can be
specified. The stopping methods are hold stop and servo power supply off. Selection of the
stopping method is set in the display of the programing pendant. Refer to Explanation *1 in
" 3.6 Overrun / Shock Sensor Releasing " for details.
SUPPLE-
MENT
 Loading...
Loading...










